相机开发指南
本文主要介绍 SpacemiT K1 平台 Camera 模块的快速上手开发。
K1 仅支持 MIPI 类型接口,使用 SpacemiT camera 驱动框架。
Camera 快速点亮导览
点亮已支持的摄像头(两步)
第一步:确定摄像头接口并运行命令 确定摄像头连接的 MIPI CSI 接口(如 CSI1),运行以下命令(以 CSI1 为例):
cam-test /usr/share/camera_json/csi1_camera_detect.json
如果成功,如下示例输出,系统会自动生成可用的 JSON 文件到 /usr/share/camera_json/ 目录。如果失败,说明没有支持此摄像头,或者硬件有问题,建议联系进迭时空的技术支持。
......
I: ./sensors/cam_sensors_module.c(235): "detect ov16a10_spm sensors in csi1: success, set 3840x2160 to 1920x1080"
I: auto_detect_camera(1401): "auto detect sensor ===================== finish "
I: update_json_file(672): "save json to /usr/share/camera_json/csi1_camera_auto.json success"
从上述运行 log 还可以得出:
- ov16a10 sensor 生成的 json 默认使用模式 0
- sensor 输出分辨率为 3840x2160
- isp 输出分辨率为 1920x1080
json 配置文件的更多描述,请参阅下文的 JSON 参数说明。
第二步:启动摄像头出图测试
运行下列命令,启动摄像头出图 500 帧,并保存第 250 帧。
cam-test /usr/share/camera_json/csi1_camera_auto.json
- 正常运行的输出 log 请参阅 正常运行单路在线测试 log 章节
- 如果运行失败,建议联系进迭时空的技术支持
第三步(可选):屏幕预览
如果摄像头需要实现屏幕预览,可以参考 gstreamer_user_guide 文档里的摄像头应用章节里的 MIPI 摄像头说明。
点亮一款新的摄像头
通常仅需要调整 cam-test 应用层的代码即可快速支持,所有 camera 相关的内核配置、DTS 无需修改。
点亮 sensor 所依赖的上下电 GPIO、MCLK 时钟、MIPI lane 配置等硬件功能,在方案对外发布前已由内部工程师验证完毕。极少数情况下需要修改 DTS 和驱动(如因外部不可抗拒原因必须修改主板 MIPI CSI 接口电路,上电 GPIOA 更改为 GPIOB,MCLKA 更改为 MCLKB 等),此情况下建议联系进迭工程师支持。
新摄像头点亮步骤
如果不考虑特殊情况,点亮一款新摄像头,建议按照以下步骤展开:
-
复用相近型号代码
- 根据当前摄像头型号,复用列表中已支持的相近型号的应用代码
- 主要复用摄像头应用的代码结构排布(减�少开发工作量)
- 修改函数名称、结构体名称为当前摄像头型号
- 详情参阅本文里的 Bring up 章节
-
配置传感器参数
- 阅读摄像头数据手册,确定:
- 寄存器位数
- I2C 地址
- 上电流程
- ID 寄存器及 ID 值
- 修改 sensor 应用代码
- 上电流程可参阅本文里的 [Sensor 驱动] 章节
- 阅读摄像头数据手册,确定:
-
配置寄存器参数
- 配置 setting tab 寄存器数组
- 根据原厂提供的信息或计算值,确定:
- lane 数 / HTS / VTS / MCLK / FPS / PCLK / 分辨率 / data Lane 等
- 完善函数内容(重点关注
xxx_spm_get_sensor_capbility和xxx_spm_get_sensor_work_info函数)
-
调整寄存器地址
- 修改
xxx_sensor.c中的曝光、增益等寄存器地址
- 修改
-
读 ID 测试
- 尝试上电读 ID
- 如果失败,重新检查步骤 1
-
出图测试
- 使用
single online test测试(参阅本文里的 场景介绍 章节 - 如果失败,可使用
only viisp case再测试 - 仍失败则检查步骤 3、4,或联系工程师分析
- 使用
-
验证 log
single online test正常出图的 log 可参阅本文里的 实操 log 章节
备注:
关于测试应用及各 test 的介绍,可参阅本文里的 场景介绍 章节。
参考文档
-
Camera 模块规格特性
芯片规格说明书 -
ISP 效果调试
ISP PQ 工具用户指南 -
ISP API 开发
ISP API 开发指南
Camera 子系统硬件框图
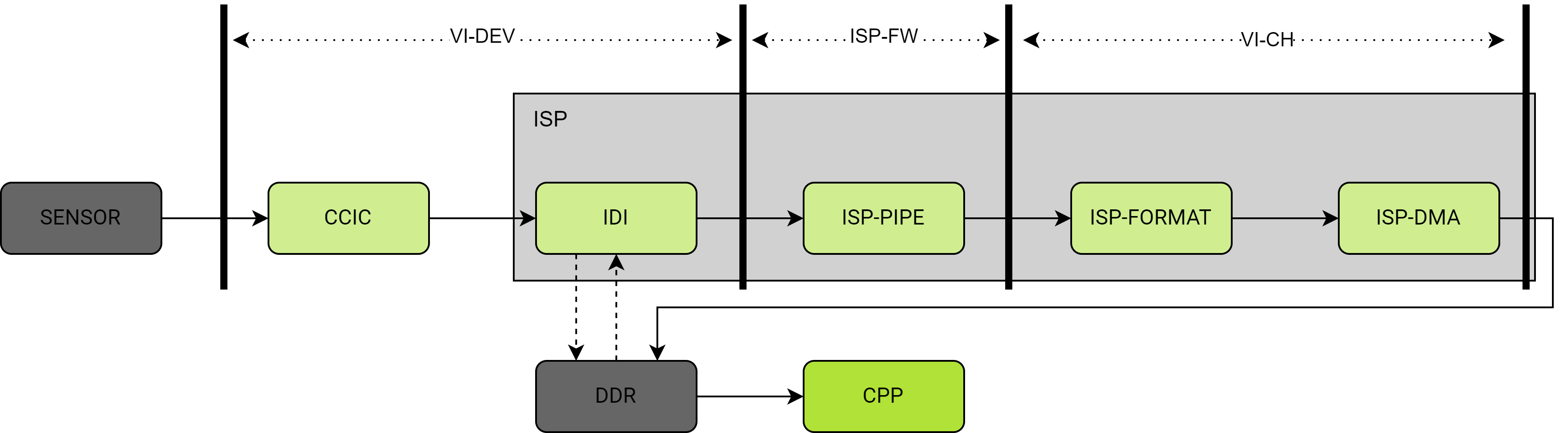
核心功能模块说明:
-
SENSOR(图像传感器)
- 将从镜头传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号,最终输出 MIPI RAW 数据。
-
CCIC(CMOS Camera Image Controller)
- 解析接收 Sensor 发送的 MIPI 数据。
-
IDI(ISP 数据输入模块)
- 接收 CCIC 发送的数据或者从 DDR 读取数据,发送到 ISP Pipeline
- 同时将 CCIC 数据转存至 DDR
-
ISP-PIPE(图像处理流水线)
- ISP 硬件内部 pipeline
- 进行一系列图像相关算法的处理
-
ISP-FORMAT(输出格式控制)
- ISP 硬件内部模块
- 控制输出的图像格式
-
ISP-DMA(直接内存访问)
- ISP 硬件内部模块
- 将图像输出到 DDR 中
-
CPP(后处理单元)
- 图像降噪处理和边缘增强。
系统数据流说明
原始光信号 → SENSOR(光电转换)→ CCIC(数据接收)→ IDI(数据路由)→ ISP-PIPE(图像处理)→ ISP-FORMAT(格式转换)→ ISP-DMA(内存写入)→ CPP(后处理)→ 最终输出
Camera 驱动框架
说明:
本章节内容仅需了解即可,实际开发中除 Sensor 驱动部分外,其他内容在 sensor bring up 时基本不会涉及。
框架简介
SpacemiT camera 驱动基于 Linux 内核 V4L2 框架实现,主要功能包括:
- 硬件寄存器访问
- 中断响应处理
- 缓冲区与事件管理
- 用户空间 SDK 接口提供
在 Camera 子系统中各个模块之间的关系如下图所示:
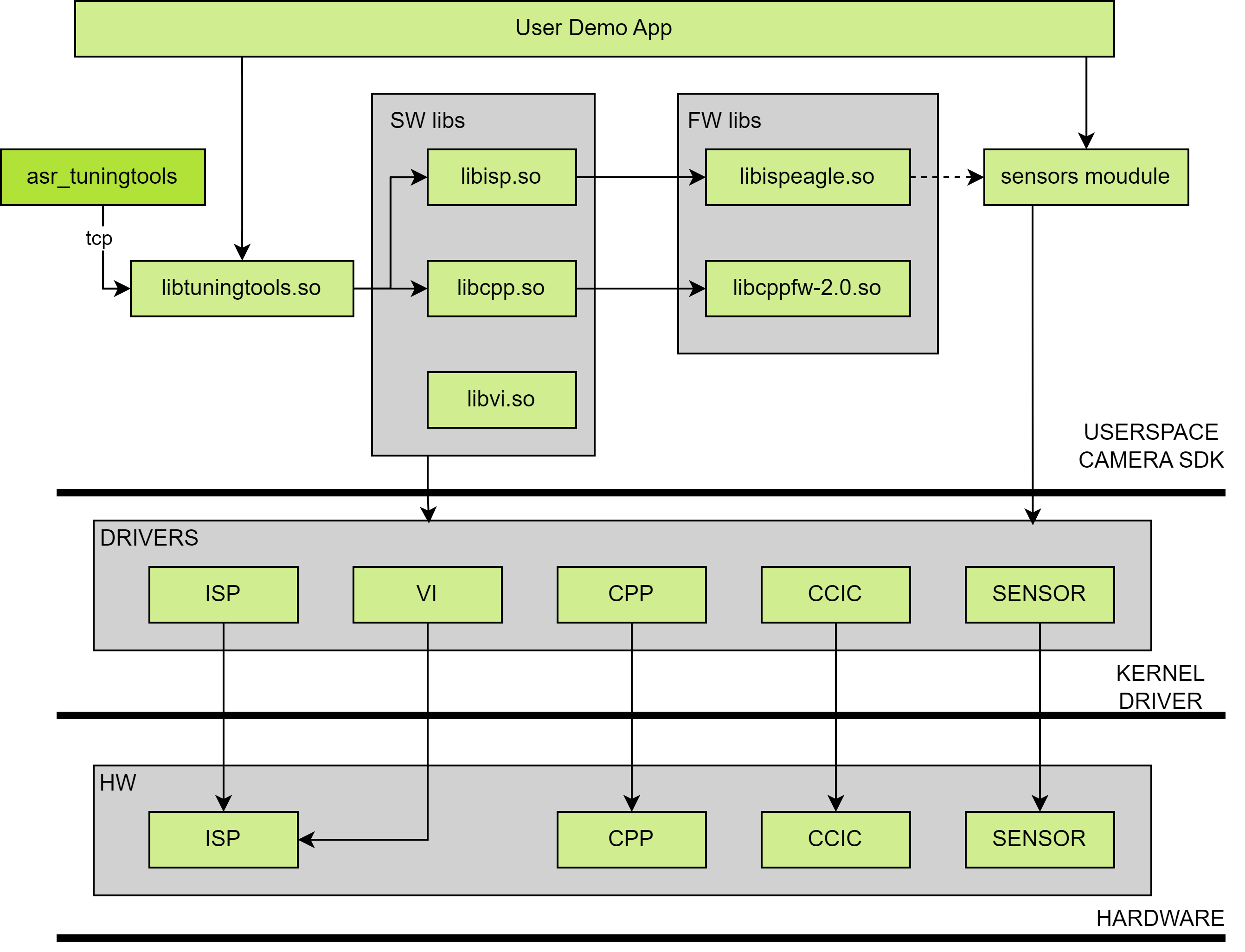
从软件调用关系来看,从上到下依次分为以下三层:
-
用户空间(Userspace):运行在用户空间。
- 主要包括 ISP、CPP、VI 和 tuningtools 软件库,以及 ISP、CPP 的 firmware 库和 sensor 模块的源码。
- 用户主要通过调用 ISP、CPP、VI 和 sensor 模块的接口来实现 camera 应用场景。Firmware 库中的接口由 ISP 和 CPP 软件库在内部调用。
- 另外,如果用户需要使用 ASR 的 tuning tool 来调试 ISP/CPP 的输出��图像效果,需要在应用程序中调用
libtuningtools.so的接口来创建 tuning server。
-
内核空间(Kernel Space):
- 运行在内核空间。
- 主要提供 ISP、CPP、VI、CCIC 和 sensor 的驱动。
-
硬件层(Hardware Layer):
- 这是驱动实际调用的硬件模块。
对于 sensor bring up 需求,主要关注用户空间的 APP demo 实现,即如何调用 SDK 接口满足场景需求。
源码结构
~/k1x/linux-6.6/drivers/media/platform/spacemit/camera$ tree
.
|-- built-in.a
|-- cam_ccic
| |-- ccic_drv.c
| |-- ccic_drv.h
| |-- ccic_hwreg.c
| |-- ccic_hwreg.h
| |-- csiphy.c
| |-- csiphy.h
| |-- dptc_drv.c
| |-- dptc_drv.h
| `-- dptc_pll_setting.h
|-- cam_cpp
| |-- cpp_compat_ioctl32.c
| |-- cpp_compat_ioctl32.h
| |-- cpp_dmabuf.c
| |-- cpp_dmabuf.h
| |-- cpp_iommu.c
| |-- cpp_iommu.h
| |-- cpp-v2p0.c
| |-- k1x_cpp.c
| |-- k1x_cpp.h
| |-- regs-cpp-iommu.h
| |-- regs-cpp-v2p0.h
| `-- regs-fbc-v2p0.h
|-- cam_isp
| |-- k1x_isp_drv.c
| |-- k1x_isp_drv.h
| |-- k1x_isp_pipe.c
| |-- k1x_isp_pipe.h
| |-- k1x_isp_reg.c
| |-- k1x_isp_reg.h
| |-- k1x_isp_statistic.c
| `-- k1x_isp_statistic.h
|-- cam_plat
| |-- cam_plat.c
| `-- cam_plat.h
|-- cam_sensor
| |-- cam_sensor.c
| `-- cam_sensor.h
|-- cam_util
| |-- cam_dbg.c
| `-- cam_dbg.h
|-- Kconfig
|-- Makefile
|-- modules.order
`-- vi
|-- cam_block.c
|-- cam_block.h
|-- k1xvi
| |-- fe_isp.c
| |-- fe_isp.h
| |-- hw-seq
| | |-- hw_ccic.c
| | |-- hw_ccic.h
| | |-- hw_dma.c
| | |-- hw_dma.h
| | |-- hw_iommu.c
| | |-- hw_iommu.h
| | |-- hw_isp.c
| | |-- hw_isp.h
| | |-- hw_postpipe.c
| | |-- hw_postpipe.h
| | |-- hw_reg.h
| | `-- hw_reg_iommu.h
| |-- k1xvi.c
| `-- k1xvi.h
|-- mlink.c
|-- mlink.h
|-- spacemit_videobuf2.h
|-- subdev.c
|-- subdev.h
|-- vdev.c
|-- vdev.h
|-- vsensor.c
`-- vsensor.h
驱动配置
执行以下命令进入 buildroot 的内核配置
make linux-menuconfig
找到对应的宏配置,依次打开即可。
Symbol: SPACEMIT_K1X_CAMERA_V2 [=y] │
│ Type : tristate │
│ Defined at drivers/media/platform/spacemit/camera/Kconfig:8 │
│ Prompt: SPACEMIT K1X camera and video capture V2 support │
│ Depends on: MEDIA_SUPPORT [=y] && MEDIA_PLATFORM_SUPPORT [=y] && MEDIA_PLATFORM_DRIVERS [=y] │
│ Location: │
│ -> Device Drivers │
│ -> Multimedia support (MEDIA_SUPPORT [=y]) │
│ -> Media drivers │
│ -> Media platform devices (MEDIA_PLATFORM_DRIVERS [=y]) │
│ (1) -> SPACEMIT K1X camera and video capture V2 support (SPACEMIT_K1X_CAMERA_V2 [=y]) │
│ Selects: MEDIA_CONTROLLER [=y] && VIDEO_V4L2_SUBDEV_API [=y]
上面是 CONFIG_SPACEMIT_K1X_CAMERA_V2 配置的路径,选择打开之后,在把剩余的 Camera 相关配置打开即可。打开并保存完毕后,可以通过输出保存的 ./output/k1/build/linux-custom/.config 文件确认,如下所示。
#
# SPACEMIT K1X Camera And Video V2
#
CONFIG_SPACEMIT_K1X_CAMERA_V2=y
CONFIG_SPACEMIT_K1X_CCIC_V2=y
CONFIG_SPACEMIT_K1X_VI_V2=y
CONFIG_SPACEMIT_K1X_VI_IOMMU=y
CONFIG_SPACEMIT_K1X_ISP_V2=y
CONFIG_SPACEMIT_K1X_CPP_V2=y
CONFIG_SPACEMIT_K1X_SENSOR_V2=y
Sensor 驱动
Sensor 相关的驱动代码位于 linux/drivers/media/platform/spacemit/camera/cam_sensor 目录。驱动加载后会在系统中生成设备节点 /dev/cam_sensorX,其中 X 为 sensor device ID,也就是下文提到的 camera ID。
Sensor 驱动是一个轻量级的字符驱动,主要功能包括:
- 控制 sensor 的电源(power)。
- 封装 I2C 的读写操作。
在 bring up(首次启动或初始化)过程中,需要特别注意以下两个函数:
camsnr_of_parse()函数表明了当前支持解析的 sensor dts 节点中的属性内容。cam_sensor_power_set()函数内定义的 power on/off 流程是否和新 sensor 操作流程一致。
在实际操作中,需要根据具体 sensor 的硬件设计和 Datasheet 来调整上电和下电流程:
-
操作一致的情况
如果新 sensor 的上电和下电流程与现有代码一致(例如imx135sensor),可以直接调用ioctl CAM_SENSOR_UNRESET来完成上电操作。例如:- 在
imx135_init函数中调用sensor_hw_unreset函数完成上电操作。 - 在
imx135_deinit函数中调用sensor_hw_reset函数完成下电操作。
- 在
-
操作不一致的情况
如果新 sensor 的上电和下电流程与现有代码不一致(例如gc2375hsensor),需要结合 sensor 字符串驱动透出的ioctl接口,自定义上电和下电函数。例如:- 自定义
gc2375h_power_on函数,组合出满足gc2375hsensor 上电要求的操作。 - 自定义
gc2375h_power_off函数,组合出满足gc2375hsensor 下电要求的操作。
- 自定义
DTS 介绍
和 Camera 相关的 DTS 配置主要分布在以下几个文件(方案间可能会有细微差别):
路径:arch/riscv/boot/dts/spacemit/k1-x-camera-sensor.dtsi
作用:各类sensor的配置信息
路径:arch/riscv/boot/dts/spacemit/k1-x-camera-sdk.dtsi
作用:ccic、csiphy、isp、vi、cpp的配置信息
路径:arch/riscv/boot/dts/spacemit/k1-x_pinctrl.dtsi
作用:camera所依赖的pinctr1配置信息
路径:arch/riscv/boot/dts/spacemit/k1-xxxx.dts
作用:不同方案的board相关配置
Pinctrl
目前仅有 camera MCLK 引脚的配置是通过 pinctrl 进行定义的。
路径: arch/riscv/boot/dts/spacemit/k1-x_pinctrl.dtsi
pinctrl_camera0: camera0_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_53, MUX_MODE1, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)) /* cam_mclk0 */
>;
};
pinctrl_camera1: camera1_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_58, MUX_MODE1, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)) /* cam_mclk1 */
>;
};
pinctrl_camera2: camera2_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_120, MUX_MODE1, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)) /* cam_mclk2 */
>;
};
路径: arch/riscv/boot/dts/spacemit/k1-x-camera-sensor.dtsi
/* imx315 */
backsensor: cam_sensor@0 {
......
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_camera0>;
......
status = "okay";
};
GPIO
查看开发板原理图 在开发板上,MIPI CSI 接口(如 CSI0、CSI1、CSI2)通常会使用 GPIO 来控制摄像头模块的复位信号和上下电信号。通常至少会有一组 GPIO 用于这些功能。假设 MIPI CSI0 接口的复位信号 GPIO 为 GPIO 111,上下电信号 GPIO 为 GPIO 113,并且该接口连接的是 camera0:imx135 摄像头模块(建议 camera ID 和 MIPI CSI 接口编号一致)。
方案 DTS 中 backsensor 配置如下。
路径:arch/riscv/boot/dts/spacemit/k1-xxxx.dts
//为了提高效率,需要如下使用GPIO
//GPIO_111 后边的2表示连续要配置的GPIO,示例中表示GPIO_111,GPIO_112。
&pinctrl {
pinctrl-single,gpio-range = <
&range GPIO_111 2 (MUX_MODE0 | EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)
>;
};
&gpio {
gpio-ranges = <
&pinctrl 111 GPIO_111 2
>;
};
/* imx315 */
&backsensor {
pwdn-gpios = <&gpio 113 0>;
reset-gpios = <&gpio 111 0>;
......
status = "okay";
};
路径:arch/riscv/boot/dts/spacemit/k1-x-camera-sensor.dtsi
//camera ID0对应imx135
&soc {
/*imx315 */
backsensor: cam sensor@0 {
cell-index =<0>;
status ="okay";
};
};
pwdn-gpios,reset-gpios 跟 sensor 模组的供电配置有关,sensor 驱动中使用这组配置完成 sensor 的上、下电和 reset 操作。不同的 sensor 模组配置可能不一样,bring up 时需要仔细修改。
Sesnor dts 配置
k1-x-camera-sensor.dtsi 内定义的 sensor 配置如下
/* imx315 */
backsensor: cam_sensor@0 {
cell-index = <0>;
twsi-index = <0>;
dphy-index = <0>;
compatible = "spacemit,cam-sensor";
clocks = <&ccu CLK_CAMM0>;
clock-names = "cam_mclk0";
/* 该部分内容已经被移动到顶层的dts
afvdd28-supply = <&ldo_12>;
avdd28-supply = <&ldo_10>;
dvdd12-supply = <&ldo_20>;
iovdd18-supply = <&ldo_11>;
cam-supply-names = "afvdd28", "avdd28", "dvdd12", "iovdd18";
*/
......
status = "okay";
};
cell-index表示整个 sensor 所在的 device ID,这个 device ID 和上层使用的 sensor device ID 完全匹配twsi-index表示 sensor 使用的 I2C core 的 ID,使用前要确保对应的 i2c bus dts 配置已经开启,具体请参阅 I2C 章节。dphy-index表示 sensor 使用的 PHY ID。clocks/clock-names表示 sensor 使用的 MCLK 的时钟源。
Bring up 总结
在 bring up 过程中,对驱动的修改主要有以下几步:
-
检查硬件平台的 CSI PHY 和 CCIC 配置
如果是硬件平台上首次 bring up 当前位置的 sensor 模组,需要检查k1-x-camera-sdk.dtsi中定义的 csiphy 和 ccic 配置是否正确。如果不是首次 bring up,或者相关配置已经正确,可以跳过此步骤。 -
修改 sensor 配置
根据新 sensor 的需求,修改k1-x-camera-sensor.dtsi或顶层 DTS 文件中定义的 sensor 配置,以适配新的 sensor。 -
检查并调整 sensor 驱动的电源管理流程
检查 sensor 驱动中的 power on/off 流程是否适配新的 sensor。如果不适配,可能需要修改 sensor 驱动代码,以确保电源管理流程符合新 sensor 的要求。
User 层 cam_sensors 库
在 User 层,sensor 模组的操作经过编译后会封装在 libcam_sensors 库中。该模块的源码目录位于 xxxx/package-src/k1x-cam/sensors。
公共操作
Sensor 的公共操作代码位于 sensor 子目录内。cam_sensor.c 文件定义了所有 sensor 的通用操作,通常不需要修改。对于具体型号的 sensor,xxx_sensor.c 文件定义了该 sensor 的通用操作。
- 如果
sensor子目录下已经存在待 bring up 的 sensor 的xxx_sensor.c文件,则无需修改; - 如果没有,需要为新的 sensor 添加
xxx_sensor.c文件。
操作函数集
xxx_sensor.c 文件定义了 struct SENSOR_OBJ 结构体,作为 sensor 对外的操作函数集。该结构体包含以下成员变量:
-
const char* name;
sensor 的名字。 -
int (*pfnInit)(void** pHandle, int sns_id, uint8_t sns_addr);
sensor 初始化。 -
int (*pfnDeinit)(void* handle);
sensor 清除初始化。 -
int (*pfnGlobalConfig)(void* handle, SENSOR_WORK_INFO_S* work_info);
根据输入的 work info 全局配置 sensor。 -
int (*pfnSetParam)(void* handle, const SENSOR_INIT_ATTR_S* init_attr);
在初始化前设置 sensor 的 3A 参数。 -
int (*pfnStreamOn)(void* handle);
sensor 开始数据流。 -
int (*pfnStreamOff)(void* handle);
sensor 停止数据流。 -
int (*pfnGetSensorOps)(void* handle, ISP_SENSOR_REGISTER_S* pSensorFuncOps);
获取 sensor 注册给 ISP 的回调操作函数集。 -
int (*pfnDetectSns)(void* handle, SENSOR_VENDOR_ID_S* vendor_id);
检测 sensor。 -
int (*pfnWriteReg)(void* handle, uint16_t regAddr, uint16_t value);
写寄存器。 -
int (*pfnReadReg)(void* handle, uint16_t regAddr, uint16_t* value);
读寄存器。
ISP 回调操作函数集
xxx_sensor.c 文件定义了 struct spmISP_SENSOR_FUNC_S 结构体,作为 sensor 注册给 ISP 的回调函数集。该结构体包含以下成员变量:
-
int (*pfn_sensor_write_reg)(void*snsHandle, uint32_t regAddr, uint32_t value);写 sensor 寄存器。 -
int (*pfn_sensor_get_isp_default)(void*snsHandle, uint32_t u32ChanelId, uint32_t camScene, ISP_SENSOR_DEFAULT_S *pstDef);获取 ISP 使用的 Tuning data 参数。 -
int (*pfn_sensor_get_isp_black_level)(void*snsHandle, uint32_t u32ChanelId, ISP_SENSOR_BLACK_LEVEL_S *pstBlackLevel);获取 sensor 默认的 Black level。 -
int (*pfn_sensor_get_reg_info)(void*snsHandle, ISP_SENSOR_REGS_INFO_S *pstSensorRegsInfo);获取 sensor 寄存器操作的基本配置。 -
int (*pfn_sensor_dump_info)(void*snsHandle);在 debug 时 dump 需要的 sensor 信息。 -
int (*pfn_sensor_group_regs_start)(void*snsHandle);sensor group writer 的 start 操作。 -
int (*pfn_sensor_group_regs_done)(void*snsHandle);sensor group writer 的 end 操作。
ISP AE 回调操作函数集
xxx_sensor.c 文件定义了 struct spmISP_SENSOR_AE_FUNC_S 结构体作为 sensor 注册给 ISP AE 算法的回调函数集。结构体包含以下成员变量:
-
int (*pfn_sensor_get_ae_default)(void* snsHandle, uint32_t u32ChanelId, ISP_SENSOR_AE_DEFAULT_S *pstSensorAeDft);
获取 sensor 默认的 AE 参数。 -
int (*pfn_sensor_fps_set)(void* snsHandle, float f32Fps);
设置 sensor 的 fps。 -
int (*pfn_sensor_get_expotime_by_fps)(void* snsHandle, float f32Fps);
根据设置的 fps 获取 sensor 的最大曝光时间。 -
int (*pfn_sensor_expotime_update)(void* snsHandle, uint32_t u32ChanelId, uint32_t u32ExpoTime, ISP_SENSOR_VTS_INFO_S *pstSensorVtsInfo);
更新 sensor 和 exposure time 相关的寄存器值,仅更新软件的值,不实际写寄存器。 -
int (*pfn_sensor_gain_update)(void* snsHandle, uint32_t u32ChanelId, uint32_t *pAgainVal, uint32_t *pDgainVal);
更新 sensor 和 gain 相关的寄存器值,仅更新软件的值,不实际写寄存器。 -
int (*pfn_get_aelib_default_settings)(void* snsHandle, uint32_t u32ChanelId, AE_LIB_DEFAULT_SETTING_S **ppstAeLibDefault);
获取指定 ISP pipeline AE 算法使用的 Tuning data 参数。
ISP AWB 回调操作函数集
xxx_sensor.c 文件定义了 struct spmISP_SENSOR_AWB_FUNC_S 结构体作为 sensor 注册给 ISP AWB 算法的回调函数集。结构体包含以下成员变量:
-
int (*pfn_sensor_get_awb_default)(void* snsHandle, uint32_t u32ChanelId, ISP_SENSOR_AWB_DEFAULT_S *pstSensorAwbDft);
获取 sensor 默认的 AWB 参数。 -
int (*pfn_get_awblib_default_settings)(void* snsHandle, uint32_t u32ChanelId, AWB_LIB_DEFAULT_SETTING_S **ppstAwbLibDefault);
获取指定 ISP pipeline AWB 算法使用的 Tuning data 参数。。
差异化操作
对于一个 sensor 模组来说,即使使用的是同一个 sensor,不同的模组在不同项目上可能需要很多差异化的配置,例如 sensor setting 或适配的 ISP tuning data。这些差异化的代码位于 module 子目录内。对于一个新的 sensor 模组,需要创建一个子目录来定义相关操作。
子目录内 xxx_setting.h 文件定义了当前模组 sensor 支持的几组 sensor setting 配置。
子目录内 xxx.c 文件定义了 struct MODULE_OBJ 结构体,作为模组对外的操作函数集。该结构体包含以下变量:
-
const char* name;模组名字。 -
int (*pfnGetsnrCapSize)(int32_t* capArraySize);获取模组 sensor 的工作模式个数(与 sensor setting 一一对应)。 -
int (*pfnGetsnrCapbility)(int32_t capArraySize, SENSOR_CAPABILITY_S* sensor_capability);获取模组 sensor 的所有工作模式的 capability(与 sensor setting 一一对应)。 -
int (*pfnGetSnrWorkInfo)(int32_t work_mode, SENSOR_WORK_INFO_S* snr_info);获取模组 sensor 的指定工作模式的 capability。与 sensor setting 一一对应)。 -
int (*pfnGetSnrVendorId)(SENSOR_VENDOR_ID_S* vendor_id);获取模组 sensor 的 vendor ID。 -
int (*pfnGetSnrI2cAddr)(uint8_t* i2c_addr);获取模组 sensor 的 I2C 地址。
SENSORS_MODULE_OBJ_S
每个 sensor 模组包含 sensor、镜头马达和 Flash(闪光灯)。在 cam_sensors_module_list.h 头文件中定义了 struct SENSORS_MODULE_OBJ 结构体,该结构体定义了一个 sensor 模组的具体组成部分,包含以下 4 个部分:
-
MODULE_OBJ_S* module_obj_p;
模组 sensor,对应module子目录。模组 sensor 的名字就是整个 sensor 模组的名字。 -
SENSOR_OBJ_S* sensor_obj_p;
sensor 公共操作集,对应sensor子目录。 -
VCM_OBJ_S* vcm_obj_p;
马达,对应vcm子目录。 -
FLASH_OBJ_S* flash_obj_p;
Flash(闪光灯),对应flash子目录。
每添加一个新的 sensor 模组,都需要在 SENSORS_MODULE_OBJ_S sensors_module_list[] 数组中添加这个新的 sensor 模组。这个列表代表了目前软件支持的 sensor 模组列表。
Bring up 总结
在 bring up 过程中,对 User 层 cam_sensors 库的修改主要有以下几步:
- 在
sensor子目录内检查是否已经定义了待 bring up sensor 的相关文件。如果没有,需要添加新 sensor 的公共操作代码。 - 在
module子目录内添加待 bring up sensor 的差异化操作的子目录,主要是针对需要支持的 sensor setting 和 tuning data 的相关操作。 - 在
SENSORS_MODULE_OBJ_S sensors_module_list[]中添加这个新的模组。 - (若有)将新的源文件加入到 Makefile 文件的
CUR_SOURCE变量中。
User 层 demo 示例
源码结构
lizhirong@lnode1:~/buildroot-sdk/package-src/k1x-cam$ tree
.
|-- CMakeLists.txt
|-- Config.in
|-- debian
| |-- bianbu.conf
| |-- changelog
| |-- compat
| |-- control
| |-- copyright
| |-- README.Debian
| |-- rules
| |-- source
| | |-- format
| | `-- local-options
| `-- watch
|-- demo
| |-- camtest.sh
| |-- cfgs
| | |-- 0
| | | |-- camtest_sensor0_mode0.json
| | | |-- camtest_sensor0_mode1.json
| | | |-- camtest_sensor0_mode2.json
| | | |-- camtest_sensor1_mode0.json
| | | `-- camtest_sensor2_mode0.json
| | |-- 1
| | | |-- camtest_main_aux.json
| | | `-- camtest_main_front.json
| | |-- 2
| | | |-- camtest_sensor0_mode0.json
| | | |-- camtest_sensor1_mode0.json
| | | `-- camtest_sensor2_mode0.json
| | |-- 3
| | | |-- camtest_sensor0_mode0.json
| | | |-- camtest_sensor1_mode0.json
| | | `-- camtest_sensor2_mode0.json
| | |-- 4
| | | |-- camtest_sensor0_mode0_nv12.json
| | | |-- camtest_sensor0_mode0_p010.json
| | | |-- camtest_sensor0_mode0_p210.json
| | | |-- camtest_sensor0_mode0_rgb565.json
| | | |-- camtest_sensor0_mode0_rgb888.json
| | | `-- camtest_sensor0_mode0_y210.json
| | |-- 5
| | | `-- camtest_1920x1080_raw12.json
| | |-- 6
| | | `-- camtest_1920x1080.json
| | `-- files
| | |-- 1920x1080_raw12_long_packed.vrf
| | `-- cpp_case_in_data
| | `-- 1920x1080
| | |-- L0.nv12
| | |-- L1.raw
| | |-- L2.raw
| | |-- L3.raw
| | `-- L4.raw
| |-- CMakeLists.txt
| |-- config.c
| |-- config.h
| |-- cpp_common.c
| |-- cpp_common.h
| |-- dual_pipeline_capture_test.c
| |-- dual_pipeline_capture_test.h
| |-- extern
| | |-- cjson.c
| | |-- cjson.h
| | |-- sstr.c
| | `-- sstr.h
| |-- gst_cam_api.c
| |-- gst_cam_api.h
| |-- include
| | |-- bufferPool.c
| | |-- bufferPool.h
| | |-- cam_interface.h
| | |-- dmabufheap
| | | |-- BufferAllocator.cpp
| | | |-- BufferAllocator.h
| | | |-- BufferAllocatorWrapper.cpp
| | | |-- BufferAllocatorWrapper.h
| | | `-- dmabufheap-defs.h
| | |-- dmabufheapAllocator.c
| | `-- dmabufheapAllocator.h
| |-- main.c
| |-- online_pipeline_test.c
| |-- online_pipeline_test.h
| |-- sensor_common.c
| |-- sensor_common.h
| |-- tuning_server.c
| |-- tuning_server.h
| |-- utils
| | |-- cam_list.c
| | |-- cam_list.h
| | |-- cam_log.h
| | |-- condition.c
| | `-- condition.h
| |-- viisp_common.c
| `-- viisp_common.h
|-- libs
| |-- include
| | |-- cam_cpp.h
| | |-- cam_module_interface.h
| | |-- CPPGlobalDefine.h
| | |-- ISPGlobalDefine.h
| | |-- spm_cam_isp.h
| | |-- spm_cam_tuning_assistant.h
| | |-- spm_cam_vi.h
| | |-- spm_comm_cam.h
| | |-- spm_comm_tuning.h
| | |-- spm_comm_vi.h
| | |-- spm_isp_comm.h
| | `-- spm_isp_sensor_comm.h
| `-- lib64
| |-- libcppfw-2.0.so
| |-- libcpp.so
| |-- libispeagle.so
| |-- libisp.so
| |-- libtuningtools.so
| `-- libvi.so
|-- pkgconfig
| `-- k1x-cam.pc.cmake
`-- sensors
|-- camera_base.h
|-- cam_log.h
|-- cam_sensors_module.c
|-- cam_sensors_module.h
|-- cam_sensors_module_list.h
|-- cam_sensor_uapi.h
|-- cam_spm_otp_handle.c
|-- cam_spm_otp_handle.h
|-- CMakeLists.txt
|-- flash
| |-- aw36515_led.c
| |-- cam_led.h
| `-- flash_aw36515.h
|-- include
| |-- spm_cam_sensors.h
| `-- spm_comm_sensors.h
|-- module
| |-- common
| | |-- common_FlickerSetting.h
| | `-- common_rawhdr_default_setting.h
| |-- gc2375h_spm
| | |-- gc2375h_spm.c
| | |-- gc2375h_spm.h
| | |-- gc2375h_spm_rear_secondary_cpp_nightshot_setting.h
| | |-- gc2375h_spm_rear_secondary_cpp_preview_setting.h
| | |-- gc2375h_spm_rear_secondary_cpp_snapshot_setting.h
| | |-- gc2375h_spm_rear_secondary_cpp_video_setting.h
| | |-- gc2375h_spm_rear_secondary_isp_setting.h
| | |-- gc2375h_spm_rear_secondary_isp_setting_video.h
| | |-- gc2375h_spm_rear_secondary_nightshot_setting.h
| | `-- gc2375h_spm_setting.h
| |-- gc5035_spm
| | |-- gc5035_spm.c
| | |-- gc5035_spm.h
| | |-- gc5035_spm_rear_secondary_cpp_nightshot_setting.h
| | |-- gc5035_spm_rear_secondary_cpp_preview_setting.h
| | |-- gc5035_spm_rear_secondary_cpp_snapshot_setting.h
| | |-- gc5035_spm_rear_secondary_cpp_video_setting.h
| | |-- gc5035_spm_rear_secondary_isp_setting.h
| | |-- gc5035_spm_rear_secondary_isp_setting_video.h
| | |-- gc5035_spm_rear_secondary_nightshot_setting.h
| | `-- gc5035_spm_setting.h
| |-- imx135_spm
| | |-- imx135_spm.c
| | |-- imx135_spm.h
| | |-- imx135_spm_rear_primary_cpp_nightshot_setting.h
| | |-- imx135_spm_rear_primary_cpp_preview_setting.h
| | |-- imx135_spm_rear_primary_cpp_snapshot_setting.h
| | |-- imx135_spm_rear_primary_cpp_video_setting.h
| | |-- imx135_spm_rear_primary_isp_setting.h
| | |-- imx135_spm_rear_primary_isp_setting_video.h
| | |-- imx135_spm_rear_primary_nightshot_setting.h
| | `-- imx135_spm_setting.h
| |-- os05a10_spm
| | |-- os05a10_spm.c
| | |-- os05a10_spm.h
| | `-- os05a10_spm_setting.h
| |-- ov08d10_spm
| | |-- ov08d10_spm.c
| | |-- ov08d10_spm_front_cpp_nightshot_setting.h
| | |-- ov08d10_spm_front_cpp_preview_setting.h
| | |-- ov08d10_spm_front_cpp_snapshot_setting.h
| | |-- ov08d10_spm_front_cpp_video_setting.h
| | |-- ov08d10_spm_front_isp_setting.h
| | |-- ov08d10_spm_front_isp_setting_video.h
| | |-- ov08d10_spm_front_nightshot_setting.h
| | |-- ov08d10_spm.h
| | `-- ov08d10_spm_setting.h
| |-- ov13b10_spm
| | |-- ov13b10_spm.c
| | |-- ov13b10_spm.h
| | |-- ov13b10_spm_rear_primary_cpp_nightshot_setting.h
| | |-- ov13b10_spm_rear_primary_cpp_preview_setting.h
| | |-- ov13b10_spm_rear_primary_cpp_snapshot_setting.h
| | |-- ov13b10_spm_rear_primary_cpp_video_setting.h
| | |-- ov13b10_spm_rear_primary_isp_setting.h
| | |-- ov13b10_spm_rear_primary_isp_setting_video.h
| | |-- ov13b10_spm_rear_primary_nightshot_setting.h
| | `-- ov13b10_spm_setting.h
| |-- ov16a10_spm
| | |-- ov16a10_spm.c
| | |-- ov16a10_spm.h
| | |-- ov16a10_spm_rear_primary_cpp_nightshot_setting.h
| | |-- ov16a10_spm_rear_primary_cpp_preview_setting.h
| | |-- ov16a10_spm_rear_primary_cpp_snapshot_setting.h
| | |-- ov16a10_spm_rear_primary_cpp_video_setting.h
| | |-- ov16a10_spm_rear_primary_isp_setting.h
| | |-- ov16a10_spm_rear_primary_isp_setting_video.h
| | |-- ov16a10_spm_rear_primary_nightshot_setting.h
| | `-- ov16a10_spm_setting.h
| `-- s5k5e3yx_spm
| |-- s5k5e3yx_spm.c
| |-- s5k5e3yx_spm_front_cpp_nightshot_setting.h
| |-- s5k5e3yx_spm_front_cpp_preview_setting.h
| |-- s5k5e3yx_spm_front_cpp_snapshot_setting.h
| |-- s5k5e3yx_spm_front_cpp_video_setting.h
| |-- s5k5e3yx_spm_front_isp_setting.h
| |-- s5k5e3yx_spm_front_isp_setting_video.h
| |-- s5k5e3yx_spm_front_nightshot_setting.h
| |-- s5k5e3yx_spm.h
| `-- s5k5e3yx_spm_setting.h
|-- sensor
| |-- cam_sensor.c
| |-- cam_sensor.h
| |-- gc2375h_sensor.c
| |-- gc5035_sensor.c
| |-- imx135_sensor.c
| |-- os05a10_sensor.c
| |-- ov08d10_sensor.c
| |-- ov13b10_sensor.c
| |-- ov16a10_sensor.c
| `-- s5k5e3yx_sensor.c
|-- test
| |-- cam_sensors_test.c
| `-- CMakeLists.txt
`-- vcm
|-- cam_vcm.c
|-- cam_vcm.h
|-- dw9714_vcm.c
|-- dw9763_vcm.c
|-- gt9772_vcm.c
`-- i2c
|-- i2c_common.c
`-- i2c_common.h
demo 编译
清理应用
~/buildroot-sdk$ make k1x-cam-dirclean
编译应用
~/buildroot-sdk$ make k1x-cam
重新编译应用
~/buildroot-sdk$ make k1x-cam-rebuild
从输出 log 中可以看到生成文件有:
>>> k1x-cam 1.0.0 Installing to target
GIT_DIR=. PATH="/home/lizhirong/buildroot-sdk/output/k1/host/bin:/home/lizhirong/buildroot-sdk/output/k1/host/sbin:/home/lizhirong/k1x/out/toolchain/bin:/home/lizhirong/k1x/vendor/tool/sign-tools:/home/lizhirong/bin/spacemit-gcc-linux-glibc-x86_64-jdsk-v0.1.8-20230609T064501/bin:/home/lizhirong/.local/bin:/home/lizhirong/bianbu-dev/scripts:/usr/share/safe-rm/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin:/home/lizhirong/bianbu-devscripts" /usr/bin/make -j65 DESTDIR=/home/lizhirong/buildroot-sdk/output/k1/target install/fast -C /home/lizhirong/buildroot-sdk/output/k1/build/k1x-cam-1.0.0/
Install the project...
-- Install configuration: "Release"
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libsdkcam.so
-- Set runtime path of "/home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libsdkcam.so" to ""
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/bin/cam-test
-- Set runtime path of "/home/lizhirong/buildroot-sdk/output/k1/target/usr/bin/cam-test" to ""
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libcpp.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libcppfw-2.0.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libtuningtools.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libisp.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libispeagle.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libvi.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/bufferPool.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/cam_interface.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/dmabufheapAllocator.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/dmabufheap
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/dmabufheap/dmabufheap-defs.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/dmabufheap/BufferAllocator.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/include/dmabufheap/BufferAllocatorWrapper.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dual_pipeline_capture_test.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/config.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/files
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/files/cpp_case_in_data
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/files/cpp_case_in_data/1920x1080
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/1
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/2
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/0
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/3
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/6
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/4
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cfgs/5
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/gst_cam_api.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/cam-test.dir
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/sdkcam.dir
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/sdkcam.dir/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/sdkcam.dir/include/dmabufheap
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/sdkcam.dir/utils
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CMakeFiles/sdkcam.dir/extern
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/utils
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/utils/condition.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/utils/cam_list.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/utils/cam_log.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/online_pipeline_test.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/sensor_common.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/viisp_common.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cpp_common.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/extern
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/extern/sstr.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/extern/cjson.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/tuning_server.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_cam_isp.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_comm_vi.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_comm_cam.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_cam_vi.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_isp_sensor_comm.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_isp_comm.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cam_module_interface.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/CPPGlobalDefine.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_comm_tuning.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_cam_tuning_assistant.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/ISPGlobalDefine.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cam_cpp.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_cam_sensors.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/spm_comm_sensors.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/bufferPool.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cam_interface.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheapAllocator.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheap
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheap/dmabufheap-defs.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheap/BufferAllocator.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheap/BufferAllocatorWrapper.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/dmabufheap-defs.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/BufferAllocator.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/BufferAllocatorWrapper.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/condition.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cam_list.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cam_log.h
-- Up-to-date: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/sstr.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/include/cjson.h
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/pkgconfig/k1x-cam.pc
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/lib/libcam_sensors.so
-- Installing: /home/lizhirong/buildroot-sdk/output/k1/target/usr/usr/bin/cam_sensors_test
-- Set runtime path of "/home/lizhirong/buildroot-sdk/output/k1/target/usr/usr/bin/cam_sensors_test" to ""
make[1]: Leaving directory '/home/lizhirong/buildroot-sdk/output/k1'
场景介绍
本章节将以三种典型场景为例,围绕 demo code,重点介绍其实现过程
Case1: single_pipeline_online_test
该 case 用于实现单条 pipeline 在线处理图像功能,图像会依次经过 ISP 和 CPP 处理,并且支持 ISP rawdump 功能。
在该 case 中,ISP 使用 firmware0,CPP 使用 pipeline0,VI work mode 使用 dev0 及其关联的 physical、rawdump CHN。
数据流如下图所示:

在配置各个模块时,要注意填充输入输出信息。如下表所示:
Table - case1 输入输出
| 模块 | 输入 | 输出 | note |
|---|---|---|---|
| senosor | NA | 1920x1080 | NA |
| ISP | 1920x1080 | 1920x1080,NV12_DWT | CAM_ISP_CH_ID_PREVIEW |
| VI | 1920x1080 | 1920x1080 | CAM_VI_WORK_MODE_ONLINE |
| CPP | 1920x1080 | 1920x1080 | NA |
对于该 case 的 buffer 处理,有如下几个 callback 需要注意:
- isp_buffer_callback:ISP 的 frameInfo callback,当 ISP firmware 获取到图像 frameInfo 之后调用该回调。用户可以通过该回调拿到 online 图像的 frameInfo 并进行特定操作。
- vi_buffer_callback:VI 的 PHYSICAL CHN buffer callback,在 VI 用户层拿到了 ISP 处理结果 buffer 之后被调用。因为 ISP 还有后级模块 CPP,所以该 callback 应负责把输出 buffer 送给 CPP 模块作为其输入(调用
cpp_post_buffer实现该功能)。 - vi_rawdump_buffer_callback:VI 应用层拿到 ISP rawdump 的数据之后,会调用该回调,用户可以在该回调中执行保存 rawdump 数据一类的操作。
- cpp_buffer_callback:CPP buffer 回调。对于 CPP 输入 buffer,应在该回调中,将该 buffer 返回给资源池,继续作为 ISP 输出 buffer 使用;对于 CPP 输出 buffer,用户可以从该 buffer 拿到 CPP 处理的结果数据。
Case2: dual_pipeline_online_test
该 case 实现双 pipeline 在线处理功能,在 single_pipeline_online_test 的 pipeline0 的基础上,增加了 pipeline1 的处理。数据流如下图所示:

除了 sensor 的数据来源于两个不同的物理设备,在软件上,两条 pipeline 的处理方式完全一样,即 Sensor、ISP、VI、CPP 均按 pipeline 配置双份即可。每条 pipeline 的 buffer 回调处理也跟 single pipeline 时一样。
对于第一条 pipeline:
- ISP 使用 firmware0
- CPP 使用 pipeline0
- VI 使用 DEV0 及其相关 CHN
对于第二条 pipeline:
- ISP 使用 firmware1
- CPP 使用 pipeline1
- VI 使用 DEV1 及其相关 CHN
Case3: dual_pipeline_capture_test
在该 case 中,ISP pipeline0 工作在 online 状态,ISP pipeline1 工作在 offline 状态。ISP pipeline0 rawdump 的结果会作为 ISP pipeline1 的输入数据,执行 ASR_ISP_TriggerRawCapture 操作后实现拍照功能。数据流如下图所示:

相较于前两个 case,需要注意 pipeline1 的流程稍有差别。
-
pipeline1 的 VI 模块使用 DEV1 的 bayerRead CHN 从 DDR 中读取 pipeline0 的 rawdump 结果,使用 physical CHN 输出 capture 的结果数据至 DDR,而 pipeline1 中的 rawdump CHN 没有工作。
-
与此相关地,两条 pipeline 的 callback 处理也会有所变化:
- vi_buffer_callback:pipeline0 和 pipeline1 的 VI PHYSICAL CHN buffer callback,跟前两个 case 类似,主要是负责把输出 buffer 送给各自的 CPP 模块作为其输入(调用
cpp_post_buffer实现该功能)。 - isp_buffer_callback:pipeline0 的 ISP frameInfo callback。跟前两个 case 一样。
- vi_rawdump_buffer_callback:pipeline0 的 rawdump callback,除了可以进行存储 rawdump 图片等常规操作外,还需要将 rawdump 的结果通知给 pipeline1,使其 bayerRead CHN 读取 rawdump 数据并 trigger ISP 执行 capture 指令。
- cpp_buffer_callback:pipeline0 和 pipeline1 的 CPP buffer 回调。跟前两个 case 类似。
- vi_buffer_callback:pipeline0 和 pipeline1 的 VI PHYSICAL CHN buffer callback,跟前两个 case 类似,主要是负责把输出 buffer 送给各自的 CPP 模块作为其输入(调用
可执行应用
k1x-cam 的测试程序集中主要包含下面几个测试程序:
- cam-test: 用于单路 pipeline、双路 pipeline、单 raw pipeline、单 cpp 处理等测试验证。
- cam_sensors_test: 用于简单的 sensor detect -> init -> stream on 流程调试验证。
cam-test
基本用法示例:
使用实例:cam-test <file.json>
//单pipeline在线测试:imx135(4208x3120@30fps raw10 4lane) –> ISP -> DDR(1080p@30fps) -> CPP
命令:cam-test demo/cfgs/0/camtest_sensor0_mode0.json
//单pipeline在线测试:imx135(4208x2416@30fps raw10 4lane) –> ISP -> DDR(1080p@30fps) -> CPP
命令:cam-test demo/cfgs/0/camtest_sensor0_mode1.json
//单pipeline在线测试:imx135(2104x1560@30fps raw10 4lane) –> ISP -> DDR(1080p@30fps) -> CPP
命令:cam-test demo/cfgs/0/camtest_sensor0_mode2.json
//单pipeline在线测试:imx135(2104x1560@30fps raw10 4lane) –> ISP -> DDR(1080p@30fps) -> CPP
命令:cam-test demo/cfgs/0/camtest_sensor0_mode2.json
//双pipeline capture测试:imx135(2104x1560@30fps raw10 4lane) –> ISP -> DDR(1080p@30fps) -> CPP
命令:cam-test demo/cfgs/2/camtest_sensor0_mode0.json
//only raw dump pipeline测试:imx135(4208x3120@30fps raw10 4lane) –> ISP(VI) -> DDR
命令:cam-test demo/cfgs/3/camtest_sensor0_mode0.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(NV12)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_nv12.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(p010)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_p010.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(p210)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_p210.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(rgb565)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_rgb565.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(rgb888)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_rgb888.json
//only isp online pipeline测试:imx135 –> ISP -> DDR(y210)
命令:cam-test demo/cfgs/4/camtest_sensor0_mode0_y210.json
//双pipeline online测试:imx135+gc2375h –> ISP -> DDR -> CPP
命令:cam-test demo/cfgs/1/camtest_main_aux.json
JSON 参数说明,以 camtest_main_aux.json 为例进行说明:
{
"tuning_server_enable":1, //用于isp tunning服务使能,在only isp online、单pipeline online、双pipeline online测试有效
"show_fps":1, //统计从0~120帧的平均帧率
"auto_run": 1, //自动测试,没有用户交互过程,默认关闭
"cpp_node": [ //CPP模块
{
"name": "cpp0", //cpp group0
"enable": 1,
"format":"NV12",
"src_from_file": 0, //如果ISP和cpp都enable了,cpp的输入就来自ISP输出
"src_path":"/tmp/cpp_case_in_data/1920x1080/",
"size_width":1920,
"size_height":1080,
},
{
"name": "cpp1", //cpp group1
"enable": 1,
"format":"NV12",
"src_from_file": 0, //
"src_path":"/vendor/etc/camera/",
"size_width":1920,
"size_height":1080,
},
],
"isp_node":[ //ISP模块,1个ISP可以接入两路video stream input
{
"name": "isp0", //isp0在线模式工作,输出1080p@30fps NV12
"enable": 1,
"work_mode":"online",
"format":"NV12",
"out_width":1920,
"out_height":1080,
"sensor_name":"imx135_asr", //imx135对应/dev/cam_sensor0,工作在模式0
"sensor_id" : 0,
"sensor_work_mode":0,
"fps":30,
"src_file":"/tmp/1920x1080_raw12_long_packed.vrf", //不生效(使用在其他模式)
"bit_depth": 12, //不生效
"in_width":1920, //不生效
"in_height":1080, //不生效
},
{
"name": "isp1", //isp1在线模式工作,输出1600x1200@30fps NV12
"enable": 1,
"work_mode":"online",
"format":"NV12",
"out_width":1600,
"out_height":1200,
"src_file":"/tmp/1920x1080_raw12_long_packed.vrf", //不生效
"bit_depth": 12, //不生效
"in_width":1920, //不生效
"in_height":1080, //不生效
"sensor_name":"gc2375h_asr", //gc2375h对应/dev/cam_sensor1,工作在模式0
"sensor_id" : 1,
"sensor_work_mode":0,
"fps":30,
},
]
}
查看出图情况
如果 JSON 配置文件中没有开启 auto_run,则需要用户通过输入交互指令来进行测试。以下是常用的交互方式(以 camtest_sensor0_mode0.json 为例):
~ # cam-test camtest_sensor0_mode0.json
....
...
s //输入字符s,然后回车,激活pipeline开流
...
... //经过一段时间,可以从log中观察到帧率信息打印,表明已经接收到图像数据,类似“I: cpp_client_receive_mctf_buffers(1833): "CPP0: frameid 342, fps 16.9"”
d //输入字符d,然后回车,可以dump出一帧CPP处理后的NV12数据(CPP输入输出只能处理NV12)
...
...
r //输入字符r,然后回车,可以dump出一帧未经处理的RAW数据,该RAW数据头部包含自定义数据,需要使用AsrVRFViewer.exe工具进行观察
...
...
c //输入字符c,然后回车,使得pipeline关流
...
...
q //输入字符q,然后回车,退出应用
注意事项
- 交互指令:测试程序实际支持的交互指令以代码为准。
- JSON 参数:JSON 参数的详细作用可以通过分析
config.c和online_pipeline_test.c或main.c的具体应用场景来了解。
实操 log(仅供参考)
Kernel 启动 camera 相关 log
......
[ 3.084917] d420a000.csiphy begin to probe
[ 3.089254] d420a000.csiphy probed
[ 3.089375] d420a800.csiphy begin to probe
[ 3.097208] d420a800.csiphy probed
[ 3.097322] d4206000.csiphy begin to probe
[ 3.105140] d4206000.csiphy probed
[ 3.116857] d420a000.ccic begin to probe
[ 3.124589] k1xccic d420a000.ccic: ipe irq: 21
[ 3.129299] d420a000.ccic probed
[ 3.148853] d420a800.ccic begin to probe
[ 3.156341] k1xccic d420a800.ccic: ipe irq: 22
[ 3.161199] d420a800.ccic probed
[ 3.180854] d4206000.ccic begin to probe
[ 3.188371] k1xccic d4206000.ccic: ipe irq: 23
[ 3.193052] d4206000.ccic probed
[ 3.255478] acquire ccic0 ctrl dev succeed
[ 3.263109] acquire ccic1 ctrl dev succeed
[ 3.267377] acquire ccic2 ctrl dev succeed
......
[ 4.573603] cam_sensor soc:cam_sensor@1: supply af_2v8 not found, using dummy regulator
[ 4.582230] cam_sensor soc:cam_sensor@1: supply dvdd_1v2 not found, using dummy regulator
[ 4.591115] cam_sensor soc:cam_sensor@2: supply af_2v8 not found, using dummy regulator
正常启动后,可以查看注册的设备节点情况:
字符设备节点
Sensor(最多可以有 3 个)
~ # ls /dev/cam_sensor*
/dev/cam_sensor0 /dev/cam_sensor1 /dev/cam_sensor2
ISP(一个 ISP 节点对应两个 pipe)
~ # ls /dev/mars11isp-pipe*
/dev/mars11isp-pipe0 /dev/mars11isp-pipe1
v4l2 相关的节点
~ # ./test.sh
Name for /sys/class/video4linux/v4l-subdev0: mars-cpp
Name for /sys/class/video4linux/v4l-subdev1: sensor0
Name for /sys/class/video4linux/v4l-subdev10: dwt0_layer1
Name for /sys/class/video4linux/v4l-subdev11: dwt0_layer2
Name for /sys/class/video4linux/v4l-subdev12: dwt0_layer3
Name for /sys/class/video4linux/v4l-subdev13: dwt0_layer4
Name for /sys/class/video4linux/v4l-subdev14: dwt1_layer1
Name for /sys/class/video4linux/v4l-subdev15: dwt1_layer2
Name for /sys/class/video4linux/v4l-subdev16: dwt1_layer3
Name for /sys/class/video4linux/v4l-subdev17: dwt1_layer4
Name for /sys/class/video4linux/v4l-subdev18: pipe0
Name for /sys/class/video4linux/v4l-subdev19: pipe1
Name for /sys/class/video4linux/v4l-subdev2: sensor1
Name for /sys/class/video4linux/v4l-subdev20: hdr_combine
Name for /sys/class/video4linux/v4l-subdev21: csi0_main
Name for /sys/class/video4linux/v4l-subdev22: csi1_main
Name for /sys/class/video4linux/v4l-subdev23: csi2_main
Name for /sys/class/video4linux/v4l-subdev24: csi0_vcdt
Name for /sys/class/video4linux/v4l-subdev25: csi1_vcdt
Name for /sys/class/video4linux/v4l-subdev26: csi2_vcdt
Name for /sys/class/video4linux/v4l-subdev3: sensor2
Name for /sys/class/video4linux/v4l-subdev4: rawdump0
Name for /sys/class/video4linux/v4l-subdev5: rawdump1
Name for /sys/class/video4linux/v4l-subdev6: offline_channel0
Name for /sys/class/video4linux/v4l-subdev7: offline_channel1
Name for /sys/class/video4linux/v4l-subdev8: formatter0
Name for /sys/class/video4linux/v4l-subdev9: formatter1
~ # cat test.sh
#!/bin/sh
for directory in /sys/class/video4linux/v4l-subdev*; do
echo -n "Name for $directory: "
cat "$directory/name"
done
正常运行单路在线测试 log
执行命令 cat /proc/sys/kernel/printk,可以得知当前内核的打印等级为:4 4 1 7。以下测试 log 是在 auto_run 设置为 1 的情况下生成的测试输出。如果在执行 cam-test 命令过程中出现带有 E: 字样的打印信息,请联系相关工程师确认是否正常。
root@spacemit-k1-x-deb1-board:~# cam-test /usr/share/camera_json/csi1_camera_auto.json
I: getTestConfig(438): "json size:1141"
I: getCppNodeConfig(31): "cpp node num: 2"
I: getIspNodeConfig(138): "isp node num: 2"
I: getSensorNodeConfig(323): "no sensor_node, use default config"
tuningServerScene: 1
show_fps: 1
auto_run: 1
test_frame: 500 //表示需要测试的帧数
dump_one_frame: 250 //表示需要保存第几帧
use_v4l: 0
auto_detect: 0
cpp0 enable: 1
cpp0 src_path: /tmp/cpp_case_in_data/1920x1080/
cpp0 size_width: 1920
cpp0 size_height: 1080
cpp1 enable: 0
cpp1 src_path:
cpp1 size_width: 0
cpp1 size_height: 0
isp0 enable: 1
isp0 work_mode: 0
isp0 format: NV12 //表示ISP输出的YUV格式
isp0 out_width: 1920 //表示ISP输出的分辨率大小
isp0 out_height: 1080
isp0 sensor_name: ov16a10_spm //表示该摄像头的类型
isp0 sensor_id: 0
isp0 sensor_work_mode: 0
isp0 fps: 30
isp0 src_file:
isp0 bit_depth: 0
isp0 in_width: 0
isp0 in_height: 0
isp1 enable: 0
isp1 work_mode: 0
isp1 format:
isp1 out_width: 0
isp1 out_height: 0
isp1 sensor_name:
isp1 sensor_id: 0
isp1 sensor_work_mode: 0
isp1 fps: 0
isp1 src_file:
isp1 bit_depth: 0
isp1 in_width: 0
isp1 in_height: 0
I: single_pipeline_online_test(1420): "test start"
I: ./sensors/sensor/cam_sensor.c(28): "open device /dev/cam_sensor0"
I: ./sensors/sensor/ov16a10_sensor.c(867): "detect sensor0 success"
I: testSensorInit(75): "sensor config info number 1"
I: testSensorInit(77): "sensor_config_info[0].width 3840"
I: testSensorInit(78): "sensor_config_info[0].height 2160"
I: testSensorInit(80): "sensor_config_info[0].bitDepth 10"
I: testSensorInit(82): "sensor_config_info[0].fps 30.000000"
I: testSensorInit(83): "sensor_config_info[0].image_mode 0"
I: testSensorInit(85): "sensor_config_info[0].lane_num 4"
I: testSensorInit(87): "sensor_config_info[0].work_mode 0"
I: ./sensors/sensor/cam_sensor.c(28): "open device /dev/cam_sensor0"
I: VI_ConfigDev(341): "map viDev(0) workMode(0) bindSensorIdx0(0) bindSensorIdx1(0) to topology:online_offline"
I: VI_ConfigDev(344): "VI switch to topology:online_offline"
I: VI_HAL_SmartSwitchTopologyWithoutApply(2053): "switch topology to online_offline"
I: SetupTopologyPipelineLinks(1402): "enable link(sensor0==>csi0_main)"
I: SetupTopologyPipelineLinks(1402): "enable link(csi0_main==>rawdump0)"
I: SetupTopologyPipelineLinks(1402): "enable link(rawdump0==>aout12)"
I: SetupTopologyPipelineLinks(1402): "enable link(csi0_main==>pipe0)"
I: SetupTopologyPipelineLinks(1402): "enable link(pipe0==>formatter0)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter0==>aout0)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter0==>dwt0_layer1)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter0==>dwt0_layer2)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter0==>dwt0_layer3)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter0==>dwt0_layer4)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt0_layer1==>aout6)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt0_layer2==>aout7)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt0_layer3==>aout8)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt0_layer4==>aout11)"
I: SetupTopologyPipelineLinks(1402): "enable link(ain1==>offline_channel1)"
I: SetupTopologyPipelineLinks(1402): "enable link(offline_channel1==>pipe1)"
I: SetupTopologyPipelineLinks(1402): "enable link(pipe1==>formatter1)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter1==>aout1)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter1==>dwt1_layer1)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter1==>dwt1_layer2)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter1==>dwt1_layer3)"
I: SetupTopologyPipelineLinks(1402): "enable link(formatter1==>dwt1_layer4)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt1_layer1==>aout2)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt1_layer2==>aout3)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt1_layer3==>aout4)"
I: SetupTopologyPipelineLinks(1402): "enable link(dwt1_layer4==>aout5)"
I: VI_ConfigDev(361): "map viDev(0) workMode(0) to pipe:pipe0"
I: VI_ConfigDev(362): "setup pipe(pipe0) input(mcode:12557 3840x2160)"
I: VI_ConfigDev(372): "apply pipe(pipe0) input"
I: ApplyTopologyPipelineInput(1701): "mipi_lane_num:4"
I: VI_ConfigDev(379): "apply pipe(pipe0)"
I: VI_OpenChnFds(506): "open video6"
I: VI_OpenChnFds(506): "open video12"
I: VI_OpenChnFds(506): "open video13"
I: VI_OpenChnFds(506): "open video14"
I: VI_OpenChnFds(506): "open video17"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x3231564e 1920x1080 planes:2) for viChn(0) viChnData(0)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x31313044 960x540 planes:2) for viChn(0) viChnData(1)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x32313044 480x270 planes:2) for viChn(0) viChnData(2)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x33313044 240x135 planes:2) for viChn(0) viChnData(3)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x34313044 120x68 planes:2) for viChn(0) viChnData(4)"
I: CAM_ISP_FwCreate(23): "create isp firmware(version=10326)!"
open /dev/ion failed!
Using DMA-BUF heap named: system
I: CAM_ISP_FWGetStatsSize(48): "all stat size(ae:3864,awb:3456,ltm:6144,af:1300!"
Using DMA-BUF heap named: linux,cma
I: CAM_ISP_FwCreate(23): "create isp firmware(version=10326)!"
I: _ISP_PIPELINE_ConfigFwFromSensor(199): "isp pipeline0 use sensor scene0 setting."
I: CAM_ISP_SensorGetExpoTimeByFps(412): "get fps(25.000000) exposure time from sensor return exp:40014!"
I: CAM_ISP_SensorSetFps(383): "set fps(30.000000) to sensor success!"
I: _ISP_PIPELINE_LoadFwSettingFile(495): "no isp setting file, use settings from user or sensor!"
I: CAM_ISP_DRV_OpenDev(31): "open /dev/mars11isp-pipe0 success, fd=59!"
I: CAM_ISP_3A_InitAeParams(92): "isp use init ae from sensor default exp=33332,again=256,tgain=256,snsdgain=4096,!"
I: _ISP_PIPELINE_InitChannel(633): "no af motor callback for isp init on pipeline0!"
I: CAM_ISP_FwGetAeProcessMode(789): "isp fw ae process at eof with 1 frame!"
I: CAM_ISP_SensorGetExpoTimeByFps(412): "get fps(25.000000) exposure time from sensor return exp:40014!"
I: _ISP_PIPELINE_LoadFwSettingFile(495): "no isp setting file, use settings from user or sensor!"
I: CAM_ISP_DRV_OpenDev(31): "open /dev/mars11isp-pipe0 success, fd=60!"
I: CAM_ISP_SensorUpdateInitAeInfo(125): "isp update sensor init ae exp=20000,again=426,snsdgain=4096,sensor default is (33332-256-4096)!"
I: _ISP_PIPELINE_SetCaptureSliceWidth(1758): "set isp slice width(1728), pad(36), in_w=3840, sns_line_time=13.000000us"
I: cpp_fw_inst_create(429): "Firmware Version: 9333"
I: subdev_node_find_by_name(52): "mars-cpp device node found: /dev/v4l-subdev0"
I: cpp_hardware_create(219): "Hardware Version: 0x00020001"
I: cam_cpp_create_grp(440): "CPP0: cam_cpp_create_grp: X"
I: cpp_init(28): "cpp attr.mode is 0\n"
I: cam_cpp_set_grp_attr(721): "CPP0: cam_cpp_set_grp_attr: 1920x1080, format 1, workmode 0"
I: cam_cpp_set_callback(623): "CPP0: cam_cpp_set_callback: X"
I: buffer_pool_continous_alloc(346): "pool(vi channel0 out buffer) buffer_size=4421120 buffer_count=4 block_size=0\n"
I: buffer_pool_continous_alloc(346): "pool(cpp channel0 out buffer) buffer_size=4421120 buffer_count=4 block_size=0\n"
I: buffer_pool_continous_alloc(346): "pool(vi rawdump channel0 out buffer) buffer_size=11059200 buffer_count=1 block_size=0\n"
I: cam_cpp_load_settingfile(746): "CPP0: cam_cpp_load_settingfile: /usr/share/camera_json/sensor_rear_primary_cpp_preview_setting.data X"
I: cpp_load_fw_settingfile(103): "cpp: load setting file OK\n"
open /dev/ion failed!
Using DMA-BUF heap named: linux,cma
I: cam_cpp_start_grp(502): "CPP0: cam_cpp_start_grp 1920x1080, mctf"
I: VI_EnableDev(467): "start pipe(pipe0)"
I: VI_OpenChnFds(506): "open video6"
I: VI_OpenChnFds(506): "open video12"
I: VI_OpenChnFds(506): "open video13"
I: VI_OpenChnFds(506): "open video14"
I: VI_OpenChnFds(506): "open video17"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x3231564e 1920x1080 planes:2) for viChn(0) viChnData(0)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x31313044 960x540 planes:2) for viChn(0) viChnData(1)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x32313044 480x270 planes:2) for viChn(0) viChnData(2)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x33313044 240x135 planes:2) for viChn(0) viChnData(3)"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x34313044 120x68 planes:2) for viChn(0) viChnData(4)"
I: VI_NormalCaptureLoop(797): "VI_NormalCaptureLoop chnDataTypeCnt=5\n"
I: VI_OpenChnFds(506): "open video18"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x41575270 3840x2160 planes:1) for viChn(2) viChnData(0)"
I: VI_OpenChnFds(506): "open video18"
I: VI_ConfigChn(562): "VI_ConfigChn set fmt(fourcc:0x41575270 3840x2160 planes:1) for viChn(2) viChnData(0)"
I: VI_NormalCaptureLoop(797): "VI_NormalCaptureLoop chnDataTypeCnt=1\n"
I: single_pipeline_online_test(1504): "sensor stream on"
//开流后输出的帧率,以及保存帧数据的log
I: cpp_client_receive_mctf_buffers(1833): "CPP0: frameid 1, fps 0.0"
I: vi_buffer_callback(508): "chn0 preview fps: 29.961245"
I: vi_buffer_callback(499): "dump one raw frame"
I: image_buffer_save(204): "save img fileName /tmp/cpp0_output_1920x1080_s1920.nv12"
I: vi_rawdump_buffer_callback(904): "VI chn 2 rawdump buffer frameId 252, buffer 0x3f96be0000, closeDown: 0"
I: raw_buffer_save(258): "save raw img fileName /tmp/raw_output0_3840x2160.raw"
I: cpp_client_receive_mctf_buffers(1833): "CPP0: frameid 301, fps 29.9"
I: VI_DisableDev(487): "stop pipe(pipe0)"
I: _ISP_PIPELINE_DeinitThreads(1672): "start thread exit"
I: _ISP_PIPELINE_DeinitThreads(1676): "end thread exit"
I: _ISP_PIPELINE_DeinitThreads(1680): "af thread exit"
I: _ISP_PIPELINE_DeinitThreads(1684): "capture thread exit"
I: cpp_client_fsm_fn_working(237): "wait for flush, event ident 0x00000000"
I: cpp_client_fsm_fn_working(243): "flush complete"
I: cam_cpp_stop_grp(527): "CPP0: cam_cpp_stop_grp X"
I: single_pipeline_online_test(1513): "sensor stream off"
I: VI_HAL_SmartSwitchTopologyWithoutApply(2069): "detach current topology(online_offline)"
I: SetupTopologyPipelineLinks(1409): "disable link(sensor0==>csi0_main)"
I: SetupTopologyPipelineLinks(1409): "disable link(csi0_main==>rawdump0)"
I: SetupTopologyPipelineLinks(1409): "disable link(rawdump0==>aout12)"
I: SetupTopologyPipelineLinks(1409): "disable link(csi0_main==>pipe0)"
I: SetupTopologyPipelineLinks(1409): "disable link(pipe0==>formatter0)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter0==>aout0)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter0==>dwt0_layer1)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter0==>dwt0_layer2)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter0==>dwt0_layer3)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter0==>dwt0_layer4)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt0_layer1==>aout6)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt0_layer2==>aout7)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt0_layer3==>aout8)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt0_layer4==>aout11)"
I: SetupTopologyPipelineLinks(1409): "disable link(ain1==>offline_channel1)"
I: SetupTopologyPipelineLinks(1409): "disable link(offline_channel1==>pipe1)"
I: SetupTopologyPipelineLinks(1409): "disable link(pipe1==>formatter1)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter1==>aout1)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter1==>dwt1_layer1)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter1==>dwt1_layer2)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter1==>dwt1_layer3)"
I: SetupTopologyPipelineLinks(1409): "disable link(formatter1==>dwt1_layer4)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt1_layer1==>aout2)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt1_layer2==>aout3)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt1_layer3==>aout4)"
I: SetupTopologyPipelineLinks(1409): "disable link(dwt1_layer4==>aout5)"
I: cam_cpp_destroy_grp(478): "CPP0: cam_cpp_destroy_grp: X"
I: single_pipeline_online_test(1577): "test end"