GMAC
介绍GMAC的功能和使用方法。
模块介绍
GMAC(Gigabit Media Access Controller)模块是一个支持千兆以太网通信的控制器,负责数据帧的发送、接收及网络流量的管理。
功能介绍
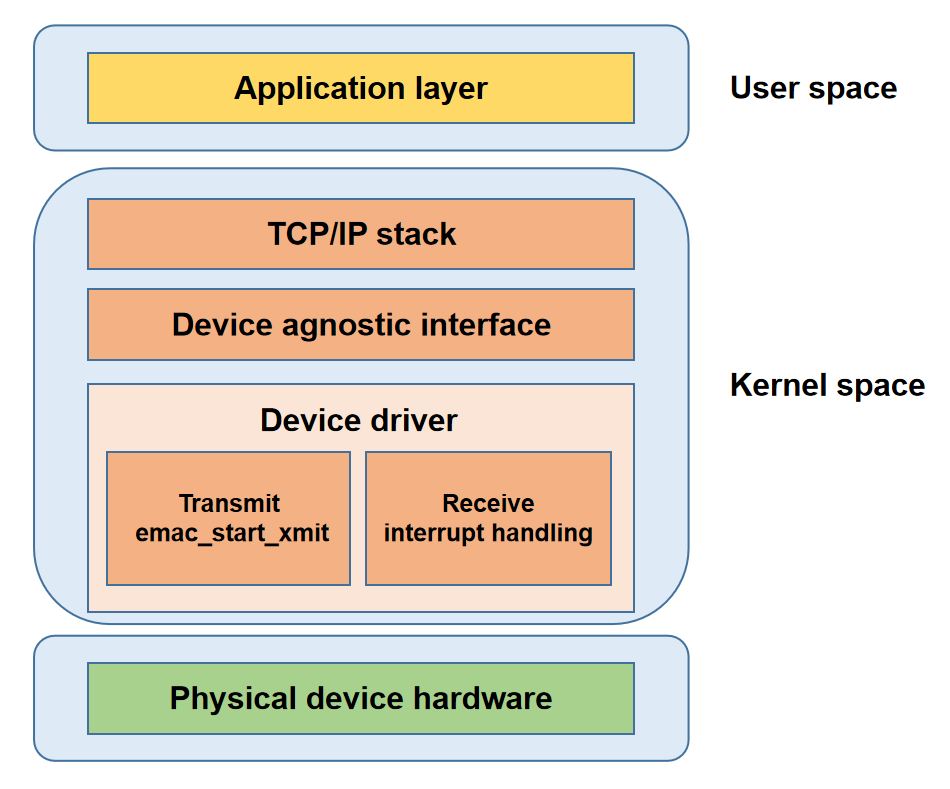
- 应用层: 面向用户提供应用服务。
- 协议栈层: 实现网络协议,为应用层提供系统调用接口。
- 网络设备抽象层: 屏蔽驱动实现细节,为协议栈提供统一接口。
- 网络设备驱动层: 负责实现数据传输和设备管理。
- 物理层: 网络硬件设备。
源码结构介绍
GMAC 驱动代码位于 drivers\net\ethernet\spacemit 目录下:
drivers\net\ethernet\spacemit
|-- emac-ptp.c #提供 PTP 协议支持
|-- k1x-emac.c #K1 GMAC 驱动代码
|-- k1x-emac.h #K1 GMAC 驱动头文件
关键特性
特性
| 特性 | 特性说明 |
|---|---|
| 支持10/100/1000M以太网 | 兼容多速率以太网连接 |
| 支持DMA | 高效数据传输降低CPU负载 |
| 支持NAPI | 提升中断处理效率减少CPU开销 |
| 中断合并机制 | 合并中断提升高负载性能 |
| 支持RGMII/RMII | 适应多应用场景 |
| 支持PTP | 实现设备间亚微秒级时间同步 |
| 支持电源管理 | 支持挂起恢复适应低功耗需求 |
性能参数
| 单网卡单工 | 单网卡双工 | 双网�卡单工 | 双网卡双工 | |
|---|---|---|---|---|
| TX速率 (Mbps) | 942 | 930 | 942 | 797 |
| RX速率 (Mbps) | 941 | 940 | 941 | 881 |
注: 双工情形下测试带宽具有一定波动
性能测试
测试环境
测试设备: 一块 K1-DEB1 板卡;一台 PC(型号:HP ProBook 450 G10,操作系统:Ubuntu 22.04.4 LTS)
网络拓扑: K1-DEB1 eth0 口与 PC 以太网口直连;K1-DEB1 eth1 口经 2.5G USB 转以太网连接器 与 PC直连
IP设置: 直连网口 IP 设置在同一个网段,PC 端开启两个 iperf 服务端
# Set IP for the PC
ifconfig <ethernet-interface> 192.168.1.100 netmask 255.255.255.0
ifconfig <usb-ethernet-interface> 192.168.2.100 netmask 255.255.255.0
# Set IP for the k1-deb1 net device
ifconfig eth0 192.168.1.200 netmask 255.255.255.0
ifconfig eth1 192.168.2.200 netmask 255.255.255.0
# Start iperf3 server on the PC
iperf3 -s -B 192.168.1.100 -A 10 -D
iperf3 -s -B 192.168.2.100 -A 11 -D
性能优化
为最大化网络吞吐量,在测试前先对 K1-DEB1 板网口中断进行合理的 CPU 绑定和分配,以充分利用多核资源
第一步: 通过以下命令查看当前中断分配情况,确认两个网卡对应的中断号:
cat /proc/interrupts | grep eth*
85: 11041 2332003 0 0 0 0 0 0 SiFive PLIC 131 Edge eth0
86: 234 0 409744 0 0 0 0 0 SiFive PLIC 133 Edge eth1
第二步: 将网口硬件中断绑定到不同 CPU 核,例如 eth0 绑定至 CPU1、eth1 绑定至 CPU2
echo 02 > /proc/irq/85/smp_affinity
echo 04 > /proc/irq/86/smp_affinity
第三步: 启用 RPS(Receive Packet Steering)进行接收端的软中断负载均衡。例如下面命令允许 CPU4 处理 eth0 上接收数据包、CPU5 处理 eth1 接收数据包,充分利用多核优势。
echo 10 > /sys/devices/platform/soc/cac80000.ethernet/net/eth0/queues/rx-0/rps_cpus
echo 4096 > /sys/devices/platform/soc/cac80000.ethernet/net/eth0/queues/rx-0/rps_flow_cnt
echo 20 > /sys/devices/platform/soc/cac81000.ethernet/net/eth1/queues/rx-0/rps_cpus
echo 4096 > /sys/devices/platform/soc/cac81000.ethernet/net/eth1/queues/rx-0/rps_flow_cnt
单网卡测试
使用 eth0 口进行单网卡测试,并将当前 iperf3 进程绑定到 CPU6
单工/TX
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 6
单工/RX
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 6 -R
双工
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 6 --bidir
双网卡测试
双网卡测试中将两个 iperf3 进程分别绑定到CPU6、CPU7
单工/TX
# Bind CPU6 for the first test, bind CPU7 for the second test
iperf3 -c 192.168.2.100 -B 192.168.2.200 -t 100 -A 6 > 1.txt &
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 7 > 2.txt &
# View the test results
cat 1.txt
cat 2.txt
单工/RX
iperf3 -c 192.168.2.100 -B 192.168.2.200 -t 100 -A 6 -R > 1.txt &
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 7 -R > 2.txt &
cat 1.txt
cat 2.txt
双工
iperf3 -c 192.168.2.100 -B 192.168.2.200 -t 100 -A 6 --bidir > 1.txt &
iperf3 -c 192.168.1.100 -B 192.168.1.200 -t 100 -A 7 --bidir > 2.txt &
cat 1.txt
cat 2.txt
配置介绍
主要包括 驱动使能配置 和 dts配置
CONFIG配置
NET_VENDOR_SPACEMIT:如果使用的是 SpacemiT 类型的以太网芯片,请将此选项设置 Y
config NET_VENDOR_SPACEMIT
bool "Spacemit devices"
default y
depends on SOC_SPACEMIT
help
If you have a network (Ethernet) chipset belonging to this class,
say Y.
Note that the answer to this question does not directly affect
the kernel: saying N will just cause the configurator to skip all
the questions regarding Spacemit chipsets. If you say Y, you will
be asked for your specific chipset/driver in the following questions.
K1X_EMAC:启用 SpacemiT 的 GMAC 驱动
config K1X_EMAC
bool "k1-x Emac Driver"
depends on SOC_SPACEMIT_K1X
select PHYLIB
help
This Driver support Spacemit k1-x Ethernet MAC
Say Y to enable support for the Spacemit Ethernet.
dts配置
GMAC dts 配置,需要确定以太网使用的 pin 组,phy 复位 GPIO,phy 型号及地址。TX phase 和 RX phase 一般采用默认值。
pinctrl
查看开发板原理图,找到 GMAC 使用的 pin 组。
假设 eth0 所使用的引脚为 GPIO00 至 GPIO14 以及 GPIO45,对应 pinctrl 配置可使用 k1-x_pinctrl.dtsi 中的 pinctrl_gmac0。
方案 dts 中 eth0 使用 gmac0 pinctrl 如下
ð0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gmac0>;
};
gpio
查看开发板原理图,找到以太网 phy 复位信号 gpio,假设 eth0 phy 复位 gpio 为 gpio 110。
方案 dts 中 eth0 使用 gpio 110 如下。
ð0 {
emac,reset-gpio = <&gpio 110 0>;
}
phy 配置
phy 标识
查看开发板原理图,确认以太网 phy 的型号和 phy id。
如以太网 phy RTL8821F-CG,其 phy id 为 001c.c916。
Phy id 信息可以查找 phy spec 或联系 phy 厂商提供。
phy 地址
查看开发板原理图,确认以太网 phy 的地址,假设为 1。
phy 配置
根据 5.3.1 和 5.3.2 得到的 phy 标识 id 和 phy 地址,对 phy 进行配置。
方案 dts eth0 配置如下
ð0 {
...
mdio-bus {
#address-cells = <0x1>;
#size-cells = <0x0>;
rgmii0: phy@0 {
compatible = "ethernet-phy-id001c.c916";
device_type = "ethernet-phy";
reg = <0x1>;
phy-mode = "rgmii";
};
};
};
TX phase 和 RX phase
tx-phase 默认值为 90,rx-phase 为 73。
不同的板子 tx-phase 和 rx-phase 可能需要调整。如果 eth0 端口可以 up,但是分配不到 ip 地址,需要联系进迭时空调整 tx-phase 和 rx-phase。
ð0 {
tx-phase = <90>;
rx-phase = <73>;
};
dts 配置
综合开发板以太网硬件信息,配置如下。
ð0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gmac0>;
emac,reset-gpio = <&gpio 110 0>;
emac,reset-active-low;
emac,reset-delays-us = <0 10000 100000>;
/* store forward mode */
tx-threshold = <1518>;
rx-threshold = <12>;
tx-ring-num = <128>;
rx-ring-num = <128>;
dma-burst-len = <5>;
ref-clock-from-phy;
clk-tuning-enable;
clk-tuning-by-delayline;
tx-phase = <90>;
rx-phase = <73>;
phy-handle = <&rgmii0>;
status = "okay";
mdio-bus {
#address-cells = <0x1>;
#size-cells = <0x0>;
rgmii0: phy@0 {
compatible = "ethernet-phy-id001c.c916";
device_type = "ethernet-phy";
reg = <0x1>;
phy-mode = "rgmii";
};
};
};
接口介绍
API介绍
emac_ioctl
emac_ioctl 用于访问 PHY(物理层)设备寄存器和配置硬件时间戳功能,各命令含义如下:
SIOCGMIIPHY:获取PHY设备地址。SIOCGMIIREG:读取指定的PHY寄存器。SIOCSMIIREG:写入指定的PHY寄存器。SIOCSHWTSTAMP:配置设备的硬件时间戳。
static int emac_ioctl(struct net_device *ndev, struct ifreq *rq, int cmd)
{
int ret = -EOPNOTSUPP;
if (!netif_running(ndev))
return -EINVAL;
switch (cmd) {
case SIOCGMIIPHY:
case SIOCGMIIREG:
case SIOCSMIIREG:
if (!ndev->phydev)
return -EINVAL;
ret = phy_mii_ioctl(ndev->phydev, rq, cmd);
break;
case SIOCSHWTSTAMP:
ret = emac_hwtstamp_ioctl(ndev, rq);
break;
default:
break;
}
return ret;
}
emac_get_link_ksettings
emac_get_link_ksettings 函数用于获取网络设备的速度、双工模式、自协商状态等链路信息,用户使用 ethtool <INTERFACE> 命令时该函数会被调用:
# ethtool eth0
Settings for eth0:
Supported ports: [ TP MII ]
Supported link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
1000baseT/Full
Supported pause frame use: Symmetric Receive-only
Supports auto-negotiation: Yes
Supported FEC modes: Not reported
Advertised link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
1000baseT/Full
Advertised pause frame use: No
Advertised auto-negotiation: Yes
Advertised FEC modes: Not reported
Speed: Unknown!
Duplex: Unknown! (255)
Port: Twisted Pair
PHYAD: 1
Transceiver: external
Auto-negotiation: on
MDI-X: Unknown
Link detected: no
emac_get_link_ksettings 函数实现如下:
static int emac_get_link_ksettings(struct net_device *ndev,
struct ethtool_link_ksettings *cmd)
{
if (!ndev->phydev)
return -ENODEV;
/* 调用phy驱动接口获取物理层链路信息 */
phy_ethtool_ksettings_get(ndev->phydev, cmd);
return 0;
}
emac_set_link_ksettings
emac_set_link_ksettings 函数用于设置网络设备的链路配置,如速度、双工模式、自协商状态等。当用户调用如下命令时,该接口会被调用:
#设置链路速度1000M、全双工、启动自动协商
ethtool -s eth0 speed 1000 duplex full autoneg on
emac_set_link_ksettings实现如下:
static int emac_set_link_ksettings(struct net_device *ndev,
const struct ethtool_link_ksettings *cmd)
{
if (!ndev->phydev)
return -ENODEV;
/* 调用phy驱动接口设置物理层链路配置 */
return phy_ethtool_ksettings_set(ndev->phydev, cmd);
}
emac_get_ethtool_stats
emac_get_ethtool_stats 用于获取GMAC统计信息,所有的统计项目如下:
struct emac_hw_stats {
u32 tx_ok_pkts; // 成功发送的有效数据包数量
u32 tx_total_pkts; // 总共尝试发送的数据包数量,包括成功和失败的包
u32 tx_ok_bytes; // 成功发送的总字节数
u32 tx_err_pkts; // 发送时发生错误的数据包数量
u32 tx_singleclsn_pkts; // 发生单次冲突后成功发送的数据包数量
u32 tx_multiclsn_pkts; // 发生多次冲突后成功发送的数据包数量
u32 tx_lateclsn_pkts; // 发生晚期冲突(发送过程中检测到)后丢弃的数据包数量
u32 tx_excessclsn_pkts; // 由于过多冲突导致发送失败的数据包数量
u32 tx_unicast_pkts; // 成功发送的单播数据包数量
u32 tx_multicast_pkts; // 成功发送的多播数据包数量
u32 tx_broadcast_pkts; // 成功发送的广播数据包数量
u32 tx_pause_pkts; // 发送的控制数据包数量(如流量控制的暂停帧)
u32 rx_ok_pkts; // 成功接收的有效数据包数量
u32 rx_total_pkts; // 总共接收到的数据包数量,包括成功和失败的包
u32 rx_crc_err_pkts; // 接收时检测到CRC错误的数据包数量
u32 rx_align_err_pkts; // 接收时检测到对齐错误的数据包数量
u32 rx_err_total_pkts; // 总共发生错误的接收数据包数量
u32 rx_ok_bytes; // 成功接收的总字节数
u32 rx_total_bytes; // 总共接收到的字节数,包括成功和失败的数据包
u32 rx_unicast_pkts; // 成功接收的单播数据包数量
u32 rx_multicast_pkts; // 成功接收的多播数据包数量
u32 rx_broadcast_pkts; // 成功接收的广播数据包数量
u32 rx_pause_pkts; // 接收到的控制数据包数量(如流量控制的暂停帧)
u32 rx_len_err_pkts; // 由于长度错误导致接收失败的数据包数量
u32 rx_len_undersize_pkts; // 接收到的过短的数据包数量(小于最小以太网帧长度)
u32 rx_len_oversize_pkts; // 接收到的过长的数据包数量(超过最大以太网帧长度)
u32 rx_len_fragment_pkts; // 接收到的片段化的数据包数量(数据包不完整)
u32 rx_len_jabber_pkts; // 接收到的杂波数据包数量(超长且包含错误)
u32 rx_64_pkts; // 接收到的长度为64字节的数据包数量
u32 rx_65_127_pkts; // 接收到的长度在65至127字节之间的数据包数量
u32 rx_128_255_pkts; // 接收到的长度在128至255字节之间的数据包数量
u32 rx_256_511_pkts; // 接收到的长度在256至511字节之间的数据包数量
u32 rx_512_1023_pkts; // 接收到的长度在512至1023字节之间的数据包数量
u32 rx_1024_1518_pkts; // 接收到的长度在1024至1518字节之间的数据包数量
u32 rx_1519_plus_pkts; // 接收到的长度大于1518字节的数据包数量
u32 rx_drp_fifo_full_pkts; // 由于接收FIFO已满而丢弃的数据包数量
u32 rx_truncate_fifo_full_pkts;// 由于接收FIFO已满�而被截断的数据包数量
//必须放在最后
spinlock_t stats_lock; // 用于保护上述统计数据访问的自旋锁,防止数据竞争
};
当用户使用如下命令时,该函数会被调用:
# ethtool -S eth0
NIC statistics:
tx_ok_pkts: 219
tx_total_pkts: 219
tx_ok_bytes: 20102
tx_err_pkts: 0
tx_singleclsn_pkts: 0
tx_multiclsn_pkts: 0
tx_lateclsn_pkts: 0
tx_excessclsn_pkts: 0
tx_unicast_pkts: 4
tx_multicast_pkts: 187
tx_broadcast_pkts: 28
tx_pause_pkts: 0
rx_ok_pkts: 209
rx_total_pkts: 209
rx_crc_err_pkts: 0
rx_align_err_pkts: 0
rx_err_total_pkts: 0
rx_ok_bytes: 18368
rx_total_bytes: 18368
rx_unicast_pkts: 3
rx_multicast_pkts: 175
rx_broadcast_pkts: 31
rx_pause_pkts: 0
rx_len_err_pkts: 0
rx_len_undersize_pkts: 0
rx_len_oversize_pkts: 0
rx_len_fragment_pkts: 0
rx_len_jabber_pkts: 0
rx_64_pkts: 17
rx_65_127_pkts: 177
rx_128_255_pkts: 0
rx_256_511_pkts: 15
rx_512_1023_pkts: 0
rx_1024_1518_pkts: 0
rx_1519_plus_pkts: 0
rx_drp_fifo_full_pkts: 0
rx_truncate_fifo_full_pkts: 0
函数实现如下:
static void emac_get_ethtool_stats(struct net_device *dev,
struct ethtool_stats *stats, u64 *data)
{
struct emac_priv *priv = netdev_priv(dev);
struct emac_hw_stats *hwstats = priv->hw_stats;
u32 *data_src;
u64 *data_dst;
int i;
/* 确保网络设备存在且正在运行 */
if (netif_running(dev) && netif_device_present(dev)) {
if (spin_trylock_bh(&hwstats->stats_lock)) {
emac_stats_update(priv); // 更新统计信息
spin_unlock_bh(&hwstats->stats_lock);
}
}
data_dst = data;
/* 遍历 ethtool 统计项数组,将硬件统计数据复制到目标数据数组中 */
for (i = 0; i < ARRAY_SIZE(emac_ethtool_stats); i++) {
data_src = (u32 *)hwstats + emac_ethtool_stats[i].offset;
*data_dst++ = (u64)(*data_src);
}
}
emac_get_ts_info
emac_get_ts_info 函数用于提供网络设备的时间戳信息,当用户使用如下命令时该函数被调用:
# ethtool --show-time-stamping eth0
Time stamping parameters for eth0:
Capabilities:
hardware-transmit (SOF_TIMESTAMPING_TX_HARDWARE)
software-transmit (SOF_TIMESTAMPING_TX_SOFTWARE)
hardware-receive (SOF_TIMESTAMPING_RX_HARDWARE)
software-receive (SOF_TIMESTAMPING_RX_SOFTWARE)
software-system-clock (SOF_TIMESTAMPING_SOFTWARE)
hardware-raw-clock (SOF_TIMESTAMPING_RAW_HARDWARE)
PTP Hardware Clock: 0
Hardware Transmit Timestamp Modes:
off (HWTSTAMP_TX_OFF)
on (HWTSTAMP_TX_ON)
Hardware Receive Filter Modes:
none (HWTSTAMP_FILTER_NONE)
all (HWTSTAMP_FILTER_ALL)
ptpv1-l4-event (HWTSTAMP_FILTER_PTP_V1_L4_EVENT)
ptpv1-l4-sync (HWTSTAMP_FILTER_PTP_V1_L4_SYNC)
ptpv1-l4-delay-req (HWTSTAMP_FILTER_PTP_V1_L4_DELAY_REQ)
ptpv2-l4-event (HWTSTAMP_FILTER_PTP_V2_L4_EVENT)
ptpv2-l4-sync (HWTSTAMP_FILTER_PTP_V2_L4_SYNC)
ptpv2-l4-delay-req (HWTSTAMP_FILTER_PTP_V2_L4_DELAY_REQ)
ptpv2-event (HWTSTAMP_FILTER_PTP_V2_EVENT)
ptpv2-sync (HWTSTAMP_FILTER_PTP_V2_SYNC)
ptpv2-delay-req (HWTSTAMP_FILTER_PTP_V2_DELAY_REQ)
emac_get_ts_info 函数实现如下:
static int emac_get_ts_info(struct net_device *dev,
struct ethtool_ts_info *info)
{
struct emac_priv *priv = netdev_priv(dev);
if (priv->ptp_support) {
/* 设置支持的时间戳选项,包括硬件和软件的时间戳 */
info->so_timestamping = SOF_TIMESTAMPING_TX_SOFTWARE |
SOF_TIMESTAMPING_TX_HARDWARE |
SOF_TIMESTAMPING_RX_SOFTWARE |
SOF_TIMESTAMPING_RX_HARDWARE |
SOF_TIMESTAMPING_SOFTWARE |
SOF_TIMESTAMPING_RAW_HARDWARE;
if (priv->ptp_clock)
info->phc_index = ptp_clock_index(priv->ptp_clock);
/* 设置支持的传输时间戳类型 */
info->tx_types = (1 << HWTSTAMP_TX_OFF) | (1 << HWTSTAMP_TX_ON);
/* 设置支持的时间戳过滤器 */
info->rx_filters = ((1 << HWTSTAMP_FILTER_NONE) |
(1 << HWTSTAMP_FILTER_PTP_V1_L4_EVENT) |
(1 << HWTSTAMP_FILTER_PTP_V1_L4_SYNC) |
(1 << HWTSTAMP_FILTER_PTP_V1_L4_DELAY_REQ) |
(1 << HWTSTAMP_FILTER_PTP_V2_L4_EVENT) |
(1 << HWTSTAMP_FILTER_PTP_V2_L4_SYNC) |
(1 << HWTSTAMP_FILTER_PTP_V2_L4_DELAY_REQ) |
(1 << HWTSTAMP_FILTER_PTP_V2_EVENT) |
(1 << HWTSTAMP_FILTER_PTP_V2_SYNC) |
(1 << HWTSTAMP_FILTER_PTP_V2_DELAY_REQ) |
(1 << HWTSTAMP_FILTER_ALL));
return 0;
} else
/* 如果不支持PTP,则调用ethtool的默认处理函数 */
return ethtool_op_get_ts_info(dev, info);
}
Debug介绍
debugfs
#用于便捷地查询或修改gmac的接口、tx phase、rx phase配置
/sys/kernel/debug/cac80000.ethernet # cat clk_tuning
Emac MII Interface : RGMII
Current rx phase : 73
Current tx phase : 60
测试介绍
查看网络接口信息
ifconfig -a
打开网络设备
ifconfig <INTERFACE> up
关闭网络设备
ifconfig <INTERFACE> down
测试和另一台主机的连通性,假设其IP地址为 192.168.0.1
ping 192.168.0.1
采用 DHCP 协议分配IP地址
udhcpc