PINCTRL
介绍 PIN 的功能和使用方法。
模块介绍
PINCTRL 是 PIN模块的控制器。
功能介绍
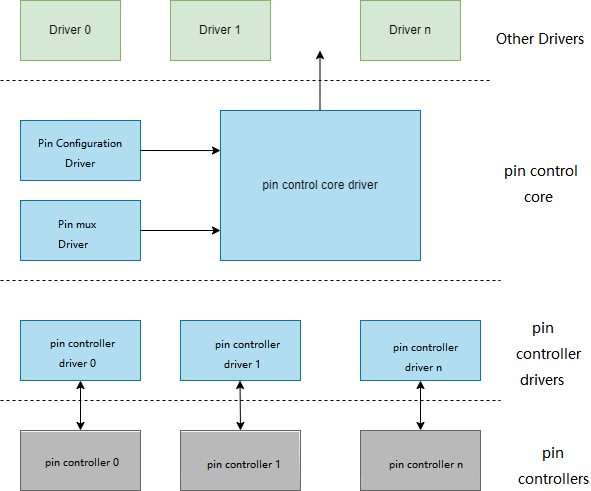
Linux pinctrl模块包括两部分: pinctrl core 和 pin 控制器驱动。
-
pinctrl core 主要有两个功能:
- 提供 pinctrl 功能接口给其它驱动使用
- 提供 pin 控制器设备注册与注销接口
-
pinctrl 控制器驱动 主要功能:
- 驱动 pin 控制器硬件
- 实现 pin 的管理和配置
源码结构介绍
控制器驱动代码在 drivers/pinctrl 目录下:
drivers/pinctrl
|-- pinctrl-single.c
关键特性
| 特性 | 特性说明 |
|---|---|
| 支持pin复用选择 | 支持将pin设置成复用功能中一种 |
| 支持设置pin的属性 | 支持设置pin的边沿检测、上下拉和驱动能力 |
配置介绍
主要包括 驱动使能配置 和 dts配置
CONFIG配置
- CONFIG_PINCTRL: 为 pin 控制器提供支持,默认值为
Y
Device Drivers
Pin controllers (PINCTRL [=y])
- CONFIG_PINCTRL_SINGLE: 为 K1 pinctrl 控制器提供支持,默认值为
Y
Device Drivers
Pin controllers (PINCTRL [=y])
One-register-per-pin type device tree based pinctrl driver (PINCTRL_SINGLE [=y])
pin使用说明
介绍在dts设备节点里使用pin。
pin 配置参数
对 pin id、复用功能 和 属性 进行定义。
详细定义内核目录 include/dt-bindings/pinctrl/k1-x-pinctrl.h。
pin id
即 pin 编号。
K1 pin 编号范围 1~147,对应宏定义 GPIO_00 ~ GPIO_127。
pin 功能
K1 pin 支持复用选择。
K1 pin 复用功能列表见 K1 Pin Multiplex。
pin 的复用功能号为 0~7,分别定义为 MUX_MODE0 ~ MUX_MODE7。
pin 属性
pin 的属性包括 边沿检测、上下拉 和 驱动能力。
边沿检测
采用功能 pin 唤醒系统时,设置产生唤醒事件的信号检测方式。
支持如下四种模式:
- 边沿检测关闭:
EDGE_NONE - 上升沿检测:
EDGE_RISE - 下降沿检测:
EDGE_FALL - 上升和下降沿:
EDGE_BOTH
上下拉
支持如下三种模式:
- 上下拉禁止:
PULL_DIS - 上拉:
PULL_UP - 下拉:
PULL_DOWN
驱动能力
-
pin 电压为 1.8V: 分为 4 级,值越大,驱动能力越强。
- PAD_1V8_DS0
- PAD_1V8_DS1
- PAD_1V8_DS2
- PAD_1V8_DS3
-
pin 电压为 3.3V: 分为 7 级,值越大,驱动能力越强。
- PAD_3V_DS0
- PAD_3V_DS1
- PAD_3V_DS2
- PAD_3V_DS3
- PAD_3V_DS4
- PAD_3V_DS5
- PAD_3V_DS6
- PAD_3V_DS7
pin 配置定义
单个 pin 配置
选定 pin 功能,设置 pin 的边沿检测,上下拉和驱动能力。
采用宏 K1X_PADCONF 进行设置, 格式为 pin_id, mux_mode, pin_config
示例:将 pin GPIO_00 设置为 gmac0 rxdv 功能,且关闭边沿检测,关闭上下拉,驱动能力设置为 2 (1.8V)。
查看 K1 pin 功能复用列表 K1 Pin Multiplex,GPIO_00 要设置成 gmac0 rxdv 功能,需要设置功能模式为 1, 即 MUX_MODE1。
设置如下:
K1X_PADCONF(GPIO_00, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rxdv */
定义一组 pin
对控制器(如 gmac、pcie、usb 和 emmc 等)使用的 功能 pin 组 进行配置。
默认的功能 pin 组定义,内核目录:arch/riscv/boot/dts/spacemit/k1-x_pinctrl.dtsi。
- 功能 pin 组是否在
k1-x_pinctrl.dtsi有定义,如果已定义且满足配置,直接使用;如果未定义或配置不满足,则按照第 2 步进行设置; - 设置控制器使用的 pin 组
以 eth0 为例,假设开发板 eth0 pin 组使用 GPIO00~GPIO14、GPIO45,且 tx 需要使能上拉。
k1-x_pinctrl.dtsi 中 gmac0 pins 默认定义
pinctrl_gmac0: gmac0_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_00, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rxdv */
K1X_PADCONF(GPIO_01, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d0 */
K1X_PADCONF(GPIO_02, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d1 */
K1X_PADCONF(GPIO_03, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_clk */
K1X_PADCONF(GPIO_04, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d2 */
K1X_PADCONF(GPIO_05, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d3 */
K1X_PADCONF(GPIO_06, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_d0 */
K1X_PADCONF(GPIO_07, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_d1 */
K1X_PADCONF(GPIO_08, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx */
K1X_PADCONF(GPIO_09, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_d2 */
K1X_PADCONF(GPIO_10, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_d3 */
K1X_PADCONF(GPIO_11, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_en */
K1X_PADCONF(GPIO_12, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdc */
K1X_PADCONF(GPIO_13, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdio */
K1X_PADCONF(GPIO_14, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_int_n */
K1X_PADCONF(GPIO_45, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_clk_ref */
>;
};
tx pin 的上下拉功能不满足,默认定义为关闭上下拉,当前需要使能上拉。
有两种方法:
- 方案 dts 重写 pin 组默认定义
- 方案 dts 增加一组 pin 定义
下面分别进行介绍。
- 重写 pin 组默认定义 在方案 dts 文件中增加如下配置,重写 gmac0 默认配置,将 gmac0 tx 设置为上拉。
&pinctrl {
pinctrl_gmac0: gmac0_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_00, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rxdv */
K1X_PADCONF(GPIO_01, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d0 */
K1X_PADCONF(GPIO_02, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d1 */
K1X_PADCONF(GPIO_03, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_clk */
K1X_PADCONF(GPIO_04, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d2 */
K1X_PADCONF(GPIO_05, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d3 */
K1X_PADCONF(GPIO_06, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d0 */
K1X_PADCONF(GPIO_07, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d1 */
K1X_PADCONF(GPIO_08, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx */
K1X_PADCONF(GPIO_09, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d2 */
K1X_PADCONF(GPIO_10, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d3 */
K1X_PADCONF(GPIO_11, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_en */
K1X_PADCONF(GPIO_12, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdc */
K1X_PADCONF(GPIO_13, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdio */
K1X_PADCONF(GPIO_14, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_int_n */
K1X_PADCONF(GPIO_45, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_clk_ref */
>;
};
};
- 新定义 gmac0 pin 组 在方案 dts 文件中增加如下配置,将 gmac0 tx 设置为上拉。
&pinctrl {
pinctrl_gmac0_1: gmac0_1_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_00, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rxdv */
K1X_PADCONF(GPIO_01, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d0 */
K1X_PADCONF(GPIO_02, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d1 */
K1X_PADCONF(GPIO_03, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_clk */
K1X_PADCONF(GPIO_04, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d2 */
K1X_PADCONF(GPIO_05, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_rx_d3 */
K1X_PADCONF(GPIO_06, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d0 */
K1X_PADCONF(GPIO_07, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d1 */
K1X_PADCONF(GPIO_08, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx */
K1X_PADCONF(GPIO_09, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d2 */
K1X_PADCONF(GPIO_10, MUX_MODE1, (EDGE_NONE | PULL_PULL | PAD_1V8_DS2)) /* gmac0_tx_d3 */
K1X_PADCONF(GPIO_11, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_tx_en */
K1X_PADCONF(GPIO_12, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdc */
K1X_PADCONF(GPIO_13, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_mdio */
K1X_PADCONF(GPIO_14, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_int_n */
K1X_PADCONF(GPIO_45, MUX_MODE1, (EDGE_NONE | PULL_DIS | PAD_1V8_DS2)) /* gmac0_clk_ref */
>;
};
};
pin 使用示例
eth0 引用方案中重写定义的 pinctrl_gmac0
eth0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gmac0>;
};
或者引用方案新增加的 pinctrl_gmac0_1
eth0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gmac0_1>;
};
接口介绍
API介绍
- 获取和释放设备 pinctrl 句柄
struct pinctrl *devm_pinctrl_get(struct device *dev);
- 释放设备pinctrl句柄
void devm_pinctrl_put(struct pinctrl *p);
- 查找pinctrl state 根据state_name 在pin control state holder中查找对应的pin control state.
struct pinctrl_state *pinctrl_lookup_state(struct pinctrl *p,
const char *name)
- 设定pinctrl state
对设备pins设置pinctrl state.
int pinctrl_select_state(struct pinctrl *p, struct pinctrl_state *state)
demo示例
使用 Linux 默认定义的 pins 状态
linux定义了 defaul、init、idle 和 sleep 四种标准 pins 状态,kernel 框架层会进行管理,模块驱动不用操作。
- default: 设备pins默认状态
- init: 设备驱动probe阶段初始化状态
- sleep: PM(电源管理)流程设备睡眠状态时pins状态, suspend时设置
- idle: runtime suspend时pins状态,pm_runtime_suspend或pm_runtime_idle时设置
如 gmac0 控制器使用 pins 定义为 default 状态, gmac 控制器驱动不用做任何操作,kernel 框架会完成 eth0 pins 的设置。 dts配置如下:
eth0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gmac0_1>;
};
自定义 pins 状态
以 K1 SD卡控制器举例,K1 SD卡控制器定义了 3 种 pins状态 default、fast 和 debug。
dts 中定义和引用如下:
&pinctrl {
...
pinctrl_mmc1: mmc1_grp {
pinctrl-single,pins = <
K1X_PADCONF(MMC1_DAT3, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d3 */
K1X_PADCONF(MMC1_DAT2, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d2 */
K1X_PADCONF(MMC1_DAT1, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d1 */
K1X_PADCONF(MMC1_DAT0, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d0 */
K1X_PADCONF(MMC1_CMD, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_cmd */
K1X_PADCONF(MMC1_CLK, MUX_MODE0, (EDGE_NONE | PULL_DOWN | PAD_3V_DS4)) /* mmc1_clk */
>;
};
pinctrl_mmc1_fast: mmc1_fast_grp {
pinctrl-single,pins = <
K1X_PADCONF(MMC1_DAT3, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d3 */
K1X_PADCONF(MMC1_DAT2, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d2 */
K1X_PADCONF(MMC1_DAT1, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d1 */
K1X_PADCONF(MMC1_DAT0, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d0 */
K1X_PADCONF(MMC1_CMD, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_cmd */
K1X_PADCONF(MMC1_CLK, MUX_MODE0, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS3)) /* mmc1_clk */
>;
};
pinctrl_mmc1_debug: mmc1_debug_grp {
pinctrl-single,pins = <
K1X_PADCONF(MMC1_DAT3, MUX_MODE3, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* uart0_txd */
K1X_PADCONF(MMC1_DAT2, MUX_MODE3, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* uart0_rxd */
K1X_PADCONF(MMC1_DAT1, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d1 */
K1X_PADCONF(MMC1_DAT0, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d0 */
K1X_PADCONF(MMC1_CMD, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_cmd */
K1X_PADCONF(MMC1_CLK, MUX_MODE0, (EDGE_NONE | PULL_DOWN | PAD_3V_DS4)) /* mmc1_clk */
>;
};
...
};
&sdhci0 {
pinctrl-names = "default","fast","debug";
pinctrl-0 = <&pinctrl_mmc1>;
pinctrl-1 = <&pinctrl_mmc1_fast>;
pinctrl-2 = <&pinctrl_mmc1_debug>;
...
};
K1 SD 控制器驱动
sdhci-of-k1x.c 管理上述pins
/* 获取pinctrl handler */
spacemit->pinctrl = devm_pinctrl_get(&pdev->dev);
...
/* 查找fast/default/debug状态的pins配置,并进行设置 */
if (spacemit->pinctrl && !IS_ERR(spacemit->pinctrl)) {
if (clock >= 200000000) {
spacemit->pin = pinctrl_lookup_state(spacemit->pinctrl, "fast");
if (IS_ERR(spacemit->pin))
pr_warn("could not get sdhci fast pinctrl state.\n");
else
pinctrl_select_state(spacemit->pinctrl, spacemit->pin);
} else if (clock == 0) {
spacemit->pin = pinctrl_lookup_state(spacemit->pinctrl, "debug");
if (IS_ERR(spacemit->pin))
pr_debug("could not get sdhci debug pinctrl state. ignore it\n");
else
pinctrl_select_state(spacemit->pinctrl, spacemit->pin);
} else {
spacemit->pin = pinctrl_lookup_state(spacemit->pinctrl, "default");
if (IS_ERR(spacemit->pin))
pr_warn("could not get sdhci default pinctrl state.\n");
else
pinctrl_select_state(spacemit->pinctrl, spacemit->pin);
}
}
...
Debug介绍
sysfs
查看系统当前 pinctrl 控制信息 和 pin配置信息
/sys/kernel/debug/pinctrl
|-- d401e000.pinctrl-pinctrl-single
| |-- gpio-ranges
| |-- pingroups
| |-- pinmux-functions
| |-- pinmux-pins
| |-- pinmux-select
| `-- pins
|-- pinctrl-devices
|-- pinctrl-handles
|-- pinctrl-maps
`-- spacemit-pinctrl@spm8821
|-- gpio-ranges
|-- pinconf-groups
|-- pinconf-pins
|-- pingroups
|-- pinmux-functions
|-- pinmux-pins
|-- pinmux-select
`-- pins
-
d401e000.pinctrl-pinctrl-single: d401e000 pinctrl 管理的 pin 详细信息。详见本文的 debugfs 小节说明 -
pinctrl-devices: 系统中所有 pinctrl 控制器信息 -
pinctrl-handles/pinctrl-maps: 显示系统已请求的 pin 功能组信息
debugfs
用于查看当前方案pin配置信息。包括系统中所有pins的使用情况,哪些用于gpio,哪些用于功能pin。
/sys/kernel/debug/pinctrl/d401e000.pinctrl-pinctrl-single
|-- gpio-ranges //配置成gpio
|-- pingroups //功能pin组
|-- pinmux-functions
|-- pinmux-pins
|-- pinmux-select
|-- pins //所有pins使用情况
测试方法
使用 devmem 工具查看某 pin 对应寄存器值:
devmem reg_addr