QSPI
介绍QSPI的功能和使用方法。
模块介绍
QSPI 是SoC和外设之间的一种串行接口总线(SPI),支持4x模式。SPI有主、从两种模式,通常一个主设备(Master)和一个或多个从设备(Slave)连接。主设备选择一个从设备进行通信,完成数据交互。主设备提供时钟,读写操作都由主设备发起。K1 QSPI暂时只支持主设备模式。
功能介绍
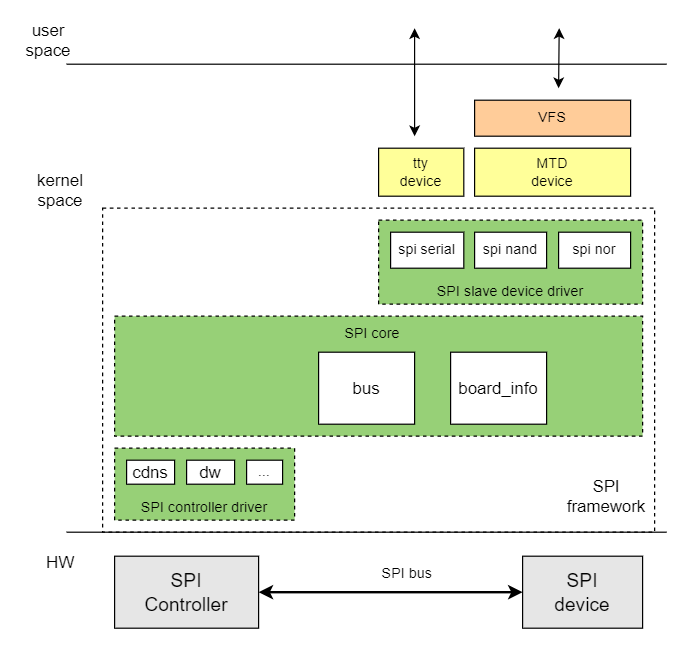
Linux spi驱动框架分为三部分: SPI core、SPI控制器驱动 和 SPI设备驱动。
SPI core主要作用:
- SPI总线和 spi_master 类注册
- SPI控制器添加和删除
- SPI设备添加和删除
- SPI设备驱动注册与注销
SPI控制器驱动:
- SPI Master控制器驱动,对SPI Master控制器进行操作
SPI设备驱动
- SPI Device驱动
源码结构介绍
控制器驱动代码位于 drivers/spi 目录下:
|-- spi-k1x-qspi.c #k1 qspi驱动
关键特性
特性
| 特性 | 特性说明 |
|---|---|
| 通信协议 | 支持SSP/SPI/MicroWire/PSP协议 |
| 通信频率 | 最高频率支持102MHz, 最低频率支持13.25MHz |
| 通信倍数 | x1/x2/x4 |
| 支持外设 | 支持spi-nor和spi-nand |
性能参数
通信频率
当前QSPI控制器最大支持102MHz,支持的通信频率列表:
| 最大频率(MHz) | 分频系数(x) | 实际频率 |
|---|---|---|
| 409 | 4,5,6,7,8 | 409/x |
| 307 | 2,3,4,5,6,7,8 | 307/x |
| 245 | 3,4,5,6,7,8 | 245/x |
| 223 | 3,4,5,6,7,8 | 223/x |
| 106 | 2,3,4,5,6,7,8 | 106/x |
| 495 | 5,6,7,8 | 495/x |
| 189 | 2,3,4,5,6,7,8 | 189/x |
通信倍速
QSPI 通信倍速支持 x1/x2/x4。
测试方法
可通过示波器或逻辑分析仪测试 SCK 信号频率,以确认通信倍速。
配置介绍
主要包括驱动使能配置和dts配置
CONFIG配置
- CONFIG_SPI 为SPI总线协议提供支持,默认值为
Y
Device Drivers
SPI support (SPI [=y])
- CONFIG_SPI_MEM 为简化操作SPI接口存储器设备提供支持,默认值为
Y
Device Drivers
SPI support (SPI [=y])
SPI memory extension (SPI_MEM [=y])
- CONFIG_SPI_K1X_QSPI 为 K1 QSPI 控制器驱动提供支持,默认值为
Y
Device Drivers
SPI support (SPI [=y])
K1X QuadSPI Controller (SPI_K1X_QSPI [=y])
dts配置
pinctrl
查看方案原理图,找到 QSPI 使用的 pin 组。可参考 PINCTRL里的 pin配置定义 小节,确定 QSPI 使用的 pin 组。
假设 QSPI 可以直接采用 k1-x_pinctrl.dtsi 中定义 pinctrl_qspi 组。
spi 设备配置
需要确认 SPI 设备类型,QSPI 与 SPI 设备通信频率和倍速。
设备类型
确认 QSPI 下连接的 SPI 设备类型,是 spi-nor 还是 spi-nand。
通信频率
QSPI 控制器和 SPI 设备最大通信速率。
当前 QSPI 控制器支持的通信频率列表见本文 性能参数 小节 的 通信频率 中的频率列表
通信倍速
QSPI 通信倍速支持 x1/x2/x4。
spi 设备 dts
以 spi nor 为例,采用最大通信频率 26.5MHz,发送和接收都采用 x4 通信。
QSPI 控制器默认最大通信频率 26.5MHz。若 QSPI 控制器的最大通信频率为 26.5MHz,则方案 DTS 中可省略 k1x,qspi-freq 配置项。
&qspi {
k1x,qspi-freq = <26500000>;
flash@0 {
compatible = "jedec,spi-nor";
reg = <0>;
spi-max-frequency = <26500000>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
m25p,fast-read;
broken-flash-reset;
status = "okay";
};
};
dts示例
spi-nor
综合上述信息,QSPI 连接 spi-nor flash,最大通信频率为 26.5MHz,且采用 x4 通信。
方案 dts 配置如下
&qspi {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_qspi>;
status = "okay";
k1x,qspi-freq = <26500000>;
flash@0 {
compatible = "jedec,spi-nor";
reg = <0>;
spi-max-frequency = <26500000>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
m25p,fast-read;
broken-flash-reset;
status = "okay";
};
};
spi-nand
QSPI 连接 spi-nand flash,最大通信频率为 26.5MHz,且采用 x4 通信。
方案 dts 配置可以参考 spi-nor,只用修改 flash 设备节点。
&qspi {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_qspi>;
status = "okay";
k1x,qspi-freq = <26500000>;
spinand: spinand@0 {
compatible = "spi-nand";
spi-max-frequency = <26500000>;
reg = <0>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
status = "okay";
};
};
接口介绍
API介绍
设备驱动注册与注销
int __spi_register_driver(struct module *owner, struct spi_driver *sdrv);
void spi_unregister_driver(struct spi_driver *sdrv);
数据传输API
- 初始化spi_message
void spi_message_init(struct spi_message *m);
- 添加spi_transfer到spi_message的transfer列表
void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m);
- write数据
int spi_write(struct spi_device *spi, const void *buf, size_t len);
- read数据
int spi_read(struct spi_device *spi, void *buf, size_t len);
- 同步传输spi_message
int spi_sync(struct spi_device *spi, struct spi_message *message);
Debug介绍
sysfs
查看系统 SPI 总线设备和驱动信息 /sys/bus/spi
|-- devices //spi总线上的设备
|-- drivers //spi总线上注册的设备驱动
|-- drivers_autoprobe
|-- drivers_probe
`-- uevent
debugfs
用于查看系统中 SPI 设备信息 /sys/kernel/debug/spi-nor/spi4.0
|-- capabilities
`-- params
# cat capabilities
Supported read modes by the flash
1S-1S-1S
opcode 0x03
mode cycles 0
dummy cycles 0
1S-1S-1S (fast read)
opcode 0x0b
mode cycles 0
dummy cycles 8
Supported page program modes by the flash
1S-1S-1S
opcode 0x02
# cat params
name w25q32
id ef 40 16 00 00 00
size 4.00 MiB
write size 1
page size 256
address nbytes 3
flags BROKEN_RESET | HAS_16BIT_SR
opcodes
read 0x0b
dummy cycles 8
erase 0x20
program 0x02
8D extension none
protocols
read 1S-1S-1S
write 1S-1S-1S
register 1S-1S-1S
erase commands
20 (4.00 KiB) [0]
d8 (64.0 KiB) [1]
c7 (4.00 MiB)
sector map
region (in hex) | erase mask | flags
------------------+------------+----------
00000000-003fffff | [01 ] |
测试介绍
spi-nand/nor读写速率测试
打开CONFIG_MTD_TESTS
Device Drivers
Memory Technology Device (MTD) support (MTD [=y])
MTD tests support (DANGEROUS) (MTD_TESTS [=m])
测试命令
insmod mtd_speedtest.ko dev=0 #0表示spi-nand/nor的mtd设备号