SDHC
介绍SDHC的功能和使用方法。
模块介绍
SDHC 是多媒体卡(MMC)、安全数字卡(SD)和安全数字输入输出(SDIO)模块的控制器。
功能介绍
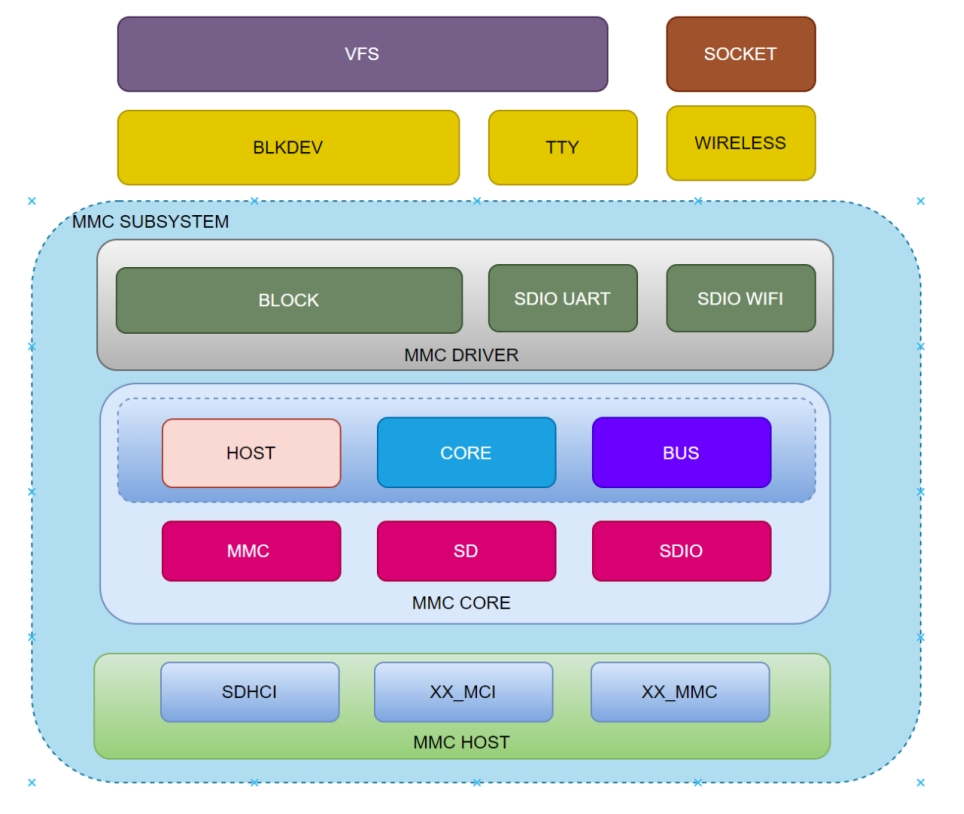
MMC 框架图可以分为以下几个层次:
- MMC Host: 这是MMC控制器驱动层,负责初始化 MMC 控制器以及底层的数据收发操作,直接控制底层寄存器。
- MMC Core: 这是核心层,负责抽象出虚拟的 card 设备,并提供接口供上层使用。
- MMC Block: 这是块设备层,负责实现块设备驱动程序,对接内核其他框架(如块设备、TTY、wifi等)。
这些层次结构共同构成了 Linux 系统中 MMC 子系统的完整框架,确保了 MMC 设备在系统中的正常运行和数据传输。
源码结构介绍
控制器驱动代码位于 drivers/mmc/host 目录下:
drivers/mmc/host
|-- sdhci.c #sdhci标准代码
|-- sdhci-pltfm.c #sdhci平台层
|-- sdhci-of-k1x.c #k1 sdhci驱动
关键特性
特性
| 特性 | 特性说明 |
|---|---|
| 支持eMMC5.1 | 支持eMMC5.1协议,包括HS400,HS200 |
| 支持sd3.0 | 支持sd3.0协议的卡,兼容sd2.0协议 |
| 支持DMA | 支持DMA数据传输 |
性能参数
| eMMC型号 | 顺序读(MB/s) | 顺序写(MB/s) | 随机读(MB/s) | 随机写(MB/s) |
|---|---|---|---|---|
| KLMAG1JETD-B041 | 295 | 53.3 | 65.4 | 45.2 |
| FEMDME008G-A8A39 | 304 | 107 | 32.3 | 44 |
测试方法
fio -name=randread -direct=1 -iodepth=64 -rw=randread -ioengine=libaio -bs=4k -size=1G -numjobs=1 -runtime=1000 -group_reporting -filename=/1
fio -name=randwrite -direct=1 -iodepth=64 -rw=randwrite -ioengine=libaio -bs=4k -size=1G -numjobs=1 -runtime=1000 -group_reporting -filename=/1
fio -name=read -direct=1 -iodepth=64 -rw=read -ioengine=libaio -bs=512k -size=1G -numjobs=1 -runtime=1000 -group_reporting -filename=/1
fio -name=write -direct=1 -iodepth=64 -rw=write -ioengine=libaio -bs=512k -size=1G -numjobs=1 -runtime=1000 -group_reporting -filename=/1
默认配置HS400 200M
配置介绍
主要包括驱动使能配置和dts配置
CONFIG配置
CONFIG_MMC 为MMC总线协议提供支持,默认值为 Y
Device Drivers
MMC/SD/SDIO card support (MMC [=y])
CONFIG_MMC_BLOCK为安装文件系统的MMC块设备驱动提供支持,默认值为 Y
Device Drivers
MMC/SD/SDIO card support (MMC [=y])
HW reset support for eMMC (PWRSEQ_EMMC [=y])
Simple HW reset support for MMC (PWRSEQ_SIMPLE [=y])
MMC block device driver (MMC_BLOCK [=y])
CONFIG_MMC_SDHCI 为MMC控制器驱动提供支持,默认情况下,此选型为Y
Device Drivers
MMC/SD/SDIO card support (MMC [=y])
Secure Digital Host Controller Interface support (MMC_SDHCI [=y])
SDHCI platform and OF driver helper (MMC_SDHCI_PLTFM [=y])
SDHCI OF support for the Spacemit K1X SDHCI controllers (MMC_SDHCI_OF_K1X [=y])
dts配置
pinctrl
SDHC 一共有三个 slots:
- slot1 支持 SD/SDIO (1/4 bit)
- slot2 支持 SDIO/eMMC (1/4 bit)
- slot3 只支持 eMMC (1/4/8 bit)
方案上一般 slot1 用于 SD,slot2 用于 SDIO,slot3 用于 eMMC。
SD 和 SDIO 都需要配置卡的信号线对应的 pinctl 为 mode0 模式,分别对应 pinctrl_mmc1 和 pinctrl_mmc2。
mmc1 的 pinctl 还有一个 fast 模式,在时钟高于 100M 时需要切换到 pinctrl_mmc1_fast 模式。
pinctrl_mmc1: mmc1_grp {
pinctrl-single,pins = <
K1X_PADCONF(MMC1_DAT3, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d3 */
K1X_PADCONF(MMC1_DAT2, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d2 */
K1X_PADCONF(MMC1_DAT1, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d1 */
K1X_PADCONF(MMC1_DAT0, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_d0 */
K1X_PADCONF(MMC1_CMD, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* mmc1_cmd */
K1X_PADCONF(MMC1_CLK, MUX_MODE0, (EDGE_NONE | PULL_DOWN | PAD_3V_DS4)) /* mmc1_clk */
>;
};
pinctrl_mmc1_fast: mmc1_fast_grp {
pinctrl-single,pins = <
K1X_PADCONF(MMC1_DAT3, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d3 */
K1X_PADCONF(MMC1_DAT2, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d2 */
K1X_PADCONF(MMC1_DAT1, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d1 */
K1X_PADCONF(MMC1_DAT0, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_d0 */
K1X_PADCONF(MMC1_CMD, MUX_MODE0, (EDGE_NONE | PULL_UP | PAD_1V8_DS3)) /* mmc1_cmd */
K1X_PADCONF(MMC1_CLK, MUX_MODE0, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS3)) /* mmc1_clk */
>;
};
gpio
SD 的检测是通过 GPIO 完成的,需要按实际原理图来配置卡检测的 GPIO。
&sdhci0 {
cd-gpios = <&gpio 80 0>;
cd-inverted;
};
比如方案使用 gpio80 来做卡的检测,还需要配置 gpio80 的 pintcl 功能。
&pinctrl {
pinctrl-single,gpio-range = <
&range GPIO_80 1 (MUX_MODE0 | EDGE_NONE | PULL_UP | PAD_3V_DS4)
>;
};
&gpio{
gpio-ranges = <
&pinctrl 80 GPIO_80 4
>;
};
电源配置
SD 和 SDIO 需要配置两个电源,分别是 vmmc-supply 和 vqmmc-supply,分别对应 卡的功能 和 IO 供电,vqmmc-supply 会根据卡的运行模式动态切换电源,硬件设计上需要确保能支持 3.3V 和 1.8V。
eMMC 设计上��会保证供电,不需要配置电源。
&sdhci0 {
vmmc-supply = <&dcdc_4>;
vqmmc-supply = <&ldo_1>;
};
tuning 配置
在 SD 高速模式下需要进行调试(Tuning),不同硬件版本需适配 TX 和 RX 的相关参数。
dts 配置示例
SD 的完整方案配置如下:
&sdhci0 {
pinctrl-names = "default","fast";
pinctrl-0 = <&pinctrl_mmc1>;
pinctrl-1 = <&pinctrl_mmc1_fast>;
bus-width = <4>;
cd-gpios = <&gpio 80 0>;
cd-inverted;
vmmc-supply = <&dcdc_4>;
vqmmc-supply = <&ldo_1>;
no-mmc;
no-sdio;
spacemit,sdh-host-caps-disable = <(
MMC_CAP_UHS_SDR12 |
MMC_CAP_UHS_SDR25
)>;
spacemit,sdh-quirks = <(
SDHCI_QUIRK_BROKEN_CARD_DETECTION |
SDHCI_QUIRK_INVERTED_WRITE_PROTECT |
SDHCI_QUIRK_BROKEN_TIMEOUT_VAL
)>;
spacemit,sdh-quirks2 = <(
SDHCI_QUIRK2_PRESET_VALUE_BROKEN |
SDHCI_QUIRK2_BROKEN_PHY_MODULE |
SDHCI_QUIRK2_SET_AIB_MMC
)>;
spacemit,aib_mmc1_io_reg = <0xD401E81C>;
spacemit,apbc_asfar_reg = <0xD4015050>;
spacemit,apbc_assar_reg = <0xD4015054>;
spacemit,rx_dline_reg = <0x0>;
spacemit,tx_dline_reg = <0x0>;
spacemit,tx_delaycode = <0xA0>;
spacemit,rx_tuning_limit = <50>;
spacemit,sdh-freq = <204800000>;
status = "okay";
};
eMMC 的完整方案配置如下:
/* eMMC */
&sdhci2 {
bus-width = <8>;
non-removable;
mmc-hs400-1_8v;
mmc-hs400-enhanced-strobe;
no-sd;
no-sdio;
spacemit,sdh-quirks = <(
SDHCI_QUIRK_BROKEN_CARD_DETECTION |
SDHCI_QUIRK_BROKEN_TIMEOUT_VAL
)>;
spacemit,sdh-quirks2 = <(
SDHCI_QUIRK2_PRESET_VALUE_BROKEN
)>;
spacemit,sdh-freq = <375000000>;
status = "okay";
};
接口介绍
API介绍
Linux操作系统包括一个实施 MMC 总线协议的 MMC 总线驱动、MMC 块驱动处理文件系统读/写调用,并使用 MMC 主控制器接口驱动向 uSDHC 发送命令。 K1 MMC 控制器驱动实现了init,exit,request,resume,suspend 和 set_ios 的接口,主要有:
- init 函数 sdhci_pltfm_init() 初始化平台硬件并注册 sdhci_k1x_pdata 结构
- exit 函数 spacemit_sdhci_remove() 取消平台硬件初始化,并释放分配的存储器
Debug介绍
sysfs
sd_card_pmux
该节点用于切换 SD 卡的 pin 为 jtag 功能,0 表示 SD 卡功能,1 表示 jtag 功能。
tx_delaycode
tx_delaycode的值默认是在方案 dts 中指定,可以通过 sysfs 下的该节点进行动态修改,方便调试阶段的验证。
debugfs
常用于查询 MMC 的工作状态,包括频率,位宽,模式等信息。
cat /sys/kernel/debug/mmc0/ios
clock: 204800000 Hz
actual clock: 204800000 Hz
vdd: 21 (3.3 ~ 3.4 V)
bus mode: 2 (push-pull)
chip select: 0 (don't care)
power mode: 2 (on)
bus width: 2 (4 bits)
timing spec: 6 (sd uhs SDR104)
signal voltage: 1 (1.80 V)
driver type: 0 (driver type B)
测试介绍
MMC/SD等存储可以通过第三方工具完成性能和功能测试,例如:FIO,bonnie++,目前 buildroot 上已集成 FIO 工具。可使用 FIO 工具进行读写性能评估与老化压力测试。