USB
介绍 USB 的功能和使用方法。
模块介绍
USB 全称 Universal Serial Bus(通用串行总线),是一种新兴的并逐渐取代其他接口标准的数据通信方式,由 Intel、Compaq、Digital、IBM、Microsoft、NEC 及 Northern Telecom 等计算机公司和通信公司于1995年联合制定,并逐渐形成了行业标准。
K1 共有三个USB控制器,分别为:
- USB2.0 OTG(USB0)
- USB2.0 Host(USB1)
- USB3.0 DRD(其中 USB2.0 端口为 USB2,SuperSpeed 端口为 USB3)
Linux 中,支持 两种 USB 角色:
- 可以外接 USB 外设的 Host 模式
- 作为 USB 外设可以接入到其他上位机的 Device 模式
功能介绍
USB Host
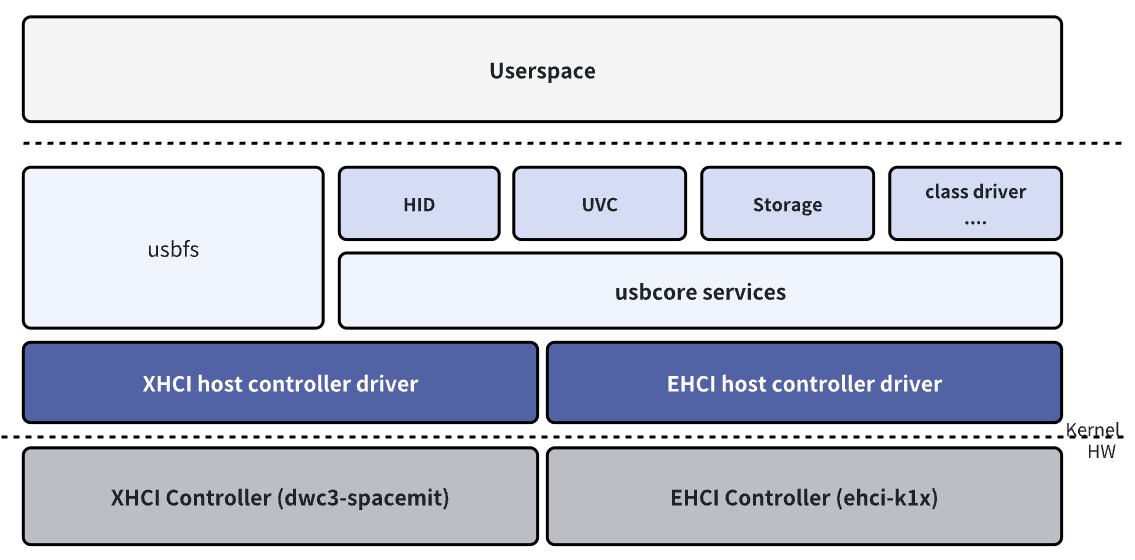
USB Host 角色驱动框架图可以分为以下几个层次:
- USB Host Controller Driver: 这是USB控制器驱动层,负责初始化控制器以及进行底层数据收发操作。
- USB Core Services: 这是核心层,负责抽象出 USB 层次和基于 URB 的传输,并提供接口供上下使用。
- USB Class Driver: 这是 USB 设备功能层,负责实现 USB 设备驱动、USB 功能驱动,对接内核其他框架(如 HID、UVC、Storage 等)。
USB Device

USB Device 角色驱动框架图可以分为以下几个层次:
- USB Device Controller Driver: 这是 USB Device 角色控制器驱动层,负责初始化控制器及进行底层数据收发操作。
- UDC Core: 这是核心层,负责抽象出 USB Device 层次和基于 usb_request 的传输,并提供接口供上下使用。
- Composite: 用于组合多个 USB Device 功能为一个设备,支持用户空间通过 configfs 配置,或者 legacy 驱动硬编码组合好的 Functions。
- Function Driver: 这是 USB Device 功能层,负责实现 USB Device 模式的功能驱动,对接内核其他框架(如存储、V4L2、网络等)。
这些层次结构共同构成了 Linux 系统中 USB 子系统的框架,确保了 USB 模块系统中的正常运行和数据传输。
源码结构介绍
USB2.0 OTG 控制器驱动代码位于 drivers/usb 目录下:
drivers/usb
|-- phy/
| |-- phy-k1x-ci-otg.c # OTG 驱动,用于实现 EHCI Host 和 K1X UDC 两种模式驱动切换。
| |-- phy/phy-k1x-ci-usb2.c # PHY 驱动。
|-- host/
| |-- ehci-k1x-ci.c # EHCI Host 模式平台驱动, 需要和 EHCI Host 驱动组合使用。
|-- gadget/
|-- udc/
|-- k1x_udc_core.c # Device 模式驱动。
USB2.0 HOST 控制器驱动代码位于 drivers/usb 目录下:
drivers/usb
|-- phy/
| |-- phy-k1x-ci-usb2.c # PHY驱动。
|-- host/
|-- ehci-k1x-ci.c # EHCI Host 模式平台驱动, 需要和 EHCI Host 驱动组合使用。
USB3.0 DRD 控制器驱动代码位于 drivers/usb 目录下:
drivers/usb
|-- phy/
| |-- phy-k1x-ci-usb2.c # USB3.0复合端口下的USB2.0 PHY驱动。
|-- phy/
| |-- spacemit/
| |-- phy-spacemit-k1x-combphy.c # USB3.0 5Gbps PHY驱动。
|-- dwc3/
| |-- dwc3-spacemit.c # DWC平台驱动, 需要和DWC3驱动搭配使用。
其他一些组件代码路径如下:
drivers/
|-- extcon/
| |-- extcon-k1xci.c # MicroUSB Pin检测连接器驱动,需搭配OTG驱动、Extcon驱动使用。
|-- usb
| |-- misc/
| |-- spacemit_onboard_hub.c # 用于板载USB外设供电配置的帮助驱动。
关键特性
USB2.0 OTG
特性
| 特性 | 特性说明 |
|---|---|
| 支持OTG | 支持 Host 和 Device 模式切换,并支持 idpin+vbuspin 检测。 |
| 支持HS,FS Host/Device | High Speed(480Mb/s), Full Speed(12Mb/s) Host/Device 模式 |
| 支持LS Host Only | 支持Low Speed(1.5Mb/s) Host only 模式 |
| 支持16 Host Channel | 最多支持16 Channel同时传输 |
| 支持16 IN + 16 OUT Device端点 | 16KB Tx Buffer, 2KB Rx Buffer |
| 支持Remote Wakeup | Host 模式下支持 High Speed, Full Speed, Low Speed Remote Wakeup |
性能参数
| 测试项目 | Tx(MB/s) | Rx(MB/s) |
|---|---|---|
| U盘测速(HIKISEMI S560 256GB) | 32.2 | 32.4 |
| U盘模式 Gadget 测速 | 21.8 | 14.8 |
测试方法
# U盘测速:
## host:
fio -name=Tx -ioengine=libaio -direct=1 -iodepth=64 -rw=write -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
fio -name=Rx -ioengine=libaio -direct=1 -iodepth=64 -rw=read -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
# U盘模式Gadget:
## device:
gadget-setup msc
## pc:
fio -name=DevRx -ioengine=libaio -direct=1 -iodepth=64 -rw=write -bs=512K -size=100M -numjobs=1 -group_reporting -filename=/dev/sda
fio -name=DevTx -ioengine=libaio -direct=1 -iodepth=64 -rw=read -bs=512K -size=100M -numjobs=1 -group_reporting -filename=/dev/sda
USB2.0 Host
特性
| 特性 | 特性说明 |
|---|---|
| 支持 HS,FS,LS Host | High Speed(480Mb/s), Full Speed(12Mb/s), Low Speed(1.5Mb/s) Host模式 |
| 支持 16 Host Channel | 最多支持 16 Channel 同时传输 |
| 支持 Remote Wakeup | Host 模式下支持 HighSpeed, FullSpeed, LowSpeed Remote Wakeup |
性能参数
| 测试项目 | Tx(MB/s) | Rx(MB/s) |
|---|---|---|
| U 盘测速(HIKISEMI S560 256GB) | 32.2 | 32.4 |
测试方法
# U盘测速:
fio -name=Tx -ioengine=libaio -direct=1 -iodepth=64 -rw=write -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
fio -name=Rx -ioengine=libaio -direct=1 -iodepth=64 -rw=read -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
USB3.0 DRD
特性
| 特性 | 特性说明 |
|---|---|
| 支持 OTG | 支持 Host 和 Device 模式切换 |
| 支持 SS Host/Device | Super Speed(5Gbps/s) Host/Device 模式 |
| 兼容 HS,FS Host/Device | High Speed(480Mb/s), Full Speed(12Mb/s) Host/Device 模式 |
| 支持 LS Host Only | 支持 Low Speed(1.5Mb/s) Host only 模式 |
| 支持 32 Device 端点 | 支持��动态分配 |
| 支持低功耗 | USB2.0 Suspend, USB3.0 U1, U2, U3 |
| 支持 Remote Wakeup | Host 模式下支持 SuperSpeed, HighSpeed, FullSpeed, LowSpeed Remote Wakeup |
性能参数
| 测试项目 | Tx(MB/s) | Rx(MB/s) |
|---|---|---|
| U盘测速(HIKISEMI S560 256GB)(SuperSpeed) | 345 | 343 |
| U盘测速(HIKISEMI X301 64GB)(HighSpeed) | 27.1 | 30.2 |
| U盘模式Gadget测速(SuperSpeed) | 349 | 328 |
测试方法
# U盘测速:
fio -name=Tx -ioengine=libaio -direct=1 -iodepth=64 -rw=write -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
fio -name=Rx -ioengine=libaio -direct=1 -iodepth=64 -rw=read -bs=512K -size=1024M -numjobs=1 -group_reporting -filename=/dev/sda
# U盘模式Gadget测速(SuperSpeed):
## device:
USB_UDC=c0a00000.dwc3 gadget-setup uas:/dev/nvme0n1p1
## pc:
fio -name=DevRx -rw=write -bs=512k -size=5G -numjobs=1 -iodepth=32 -group_reporting -direct=1 -ioengine=libaio -filename=/dev/sda
fio -name=DevTx -rw=read -bs=512k -size=5G -numjobs=1 -iodepth=32 -group_reporting -direct=1 -ioengine=libaio -filename=/dev/sda
配置介绍
主要包括 驱动使能配置 和 DTS 配置
USB2.0 OTG 配置介绍
CONFIG 配置
CONFIG_K1XCI_USB2_PHY 为 USB2.0 OTG 的 PHY 提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Physical Layer drivers
-> K1x ci USB 2.0 PHY Driver (K1XCI_USB2_PHY [=y])
CONFIG_USB_K1X_UDC 为 USB2.0 OTG 的 Device 功能提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Gadget Support (USB_GADGET [=y])
-> USB Peripheral Controller
-> Spacemit K1X USB2.0 Device Controller (USB_K1X_UDC [=y])
CONFIG_USB_EHCI_K1X 为 USB2.0 OTG 的 Host 功能提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> EHCI HCD (USB 2.0) support (USB_EHCI_HCD [=y])
-> EHCI support for Spacemit k1x USB controller (USB_EHCI_K1X [=y])
CONFIG_USB_K1XCI_OTG 为 USB2.0 OTG 的 OTG 角色切换提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Physical Layer drivers
-> Spacemit K1-x USB OTG support (USB_K1XCI_OTG [=y])
CONFIG_EXTCON_USB_K1XCI 为 USB2.0 OTG 用于 MicroUSB 接口的 ID Pin+Vbus Pin 检测连接器驱动提供支持,默认 Y。
Device Drivers
-> External Connector Class (extcon) support (EXTCON [=y])
-> Spacemit K1-x USB extcon support (EXTCON_USB_K1XCI [=y])
DTS 配置
USB2.0 OTG 支持 4 种配置模式:
- 通常情况下配置为 以 Device Only 模式工作。
- 如果支持手动切换 Host,推荐配置为 以 OTG 模式工作(基于 usb-role-switch) 并且配置为默认 Device 角色。
- 如果支持自动切换双角色(如 Type-C OTG 接口),推荐配置为 以 OTG 模式工作(基于 usb-role-switch),并接入 Type-C 驱动或者 GPIO 检测。
- 如果基于 K1 平台,且使用了 EXTCON 框架进行 USB 角色控制,也支持配置为 以 OTG 模式工作(基于 K1 EXTCON),此方式通常依赖外部事件(如 ID 检测或 VBUS 状态)来完成角色切换。
以 Device Only 模式工作
USB2.0 OTG 控制器 device 模式对应的设备树节点为 udc,作为 device 模式工作时,需要配置 DTS
- disable
ehci节点,otg节点。 - enable
usbphy节点。 - udc节点的
spacemit,udc-mode属性为MV_USB_MODE_UDC来选择 device 模式。
方案 DTS 配置如下:
&usbphy {
status = "okay";
};
&udc {
spacemit,udc-mode = <MV_USB_MODE_UDC>;
status = "okay";
};
&ehci {
status = "disabled";
};
&otg {
status = "disabled";
};
以 Host Only 模式工作
USB2.0 OTG 控制器 host 模式对应的设备树节点为 ehci,作为 host 模式工作时,可以通过 dts 配置:
- disable
udc节点,otg节点。 ehci节点的spacemit,udc-mode属性为MV_USB_MODE_HOST(默认值)来选择 host 模式。- 如果 host 需要适用 GPIO 控制 vbus 开关,可以使用
spacemit_onboard_hub驱动配置。 - 可选属性
spacemit,reset-on-resume,用于控制系统休眠唤醒后是否 reset 控制器。
&usbphy {
status = "okay";
};
&udc {
status = "disabled";
};
&ehci {
spacemit,reset-on-resume;
spacemit,udc-mode = <MV_USB_MODE_HOST>;
status = "okay";
};
&otg {
status = "disabled";
};
以 OTG 模式工作(基于 usb-role-switch)
此配置模式适合大部分方案,可接入 Type-C 角色检测、GPIO 角色检测、支持用户手动切换等。
需要为 otg 节点配置 usb-role-switch 属性,以启用对 role-switch 的支持,通常适用于 Type-C 连接器,也支持其他如 GPIO 检测,具体接入方法可参考 Linux 内核文档 usb-connector、Type-C 相关章节。配置后,/sys/class/usb_role/ 下会出��现一个 mv-otg-role-switch 节点。
通过启用 otg 节点,并且配置 otg 节点的 role-switch-user-control 属性。
otg 节点支持配置 vbus-gpios 用于控制角色切换时的 vbus。
otg 节点的 role-switch-default-mode 属性决定开机后的默认角色,可选 host,peripheral。
otg 节点的 role-switch-user-control 属性决定用户是否可以通过 sysfs 的 /sys/class/usb_role/mv-otg-role-switch/role 手动控制角色切换。
&usbphy {
status = "okay";
};
&otg {
usb-role-switch;
role-switch-user-control;
spacemit,reset-on-resume;
role-switch-default-mode = "host";
vbus-gpios = <&gpio 123 0>;
status = "okay";
/* 可选
typec_connector {
....
}
*/
};
&udc {
spacemit,udc-mode = <MV_USB_MODE_OTG>;
status = "okay";
};
&ehci {
spacemit,udc-mode = <MV_USB_MODE_OTG>;
status = "okay";
};
以 OTG 模式工作(基于 K1 EXTCON)
此配置只适用于 MicroUSB 接口,且需要支持 VBUS PIN、ID PIN 检测 OTG 自动切换角色的方案。
以 OTG (基于 K1 EXTCON) 模式工作,硬件方案需要进行如下设计:
- USB_ID0 Pin(INPUT) 接入 OTG MicroUSB ID Pin。(ID 接地 USB2.0 OTG 作为 host 工作, ID 悬空/高 USB2.0 OTG 作为 device 工作)。
- VBUS_ON0 Pin (INPUT)接入 OTG MicroUSB VBUS Pin,当 VBUS 有对外输出或外部输入时,VBUS_ON0 为高。
- 需要选择一个 Pin 配置为 VBUS 开关(可选 GPIO63 或 GPIO127)配置为 drive_vbus0_iso 功能,用于驱动根据是否处于 host 模式下开关的对外 5V 供电开关。
- 在 drive_vbus0_iso 输出高以前,VBUS_ON0 不能为高,MicroUSB 也不能对外供电,防止造成硬件损坏。
- USB2.0 OTG Port 切换为 device 模式下时,端口接入外部 vbus 供电后,VBUS_ON0 需被拉高。
DTS 需要进行下面的配置:
- 使用 pinctrl 把 GPIO64(另可选GPIO125)配置为 VBUS_ON0 功能,把 GPIO65(另可选GPIO126)配置为USB_ID0功能,用于检测 otg 接口状态。
- 使能
usbphy、extcon、otg、udc、ehci节点。 - 把 DTS 中
udc节点、ehci节点、otg节点的spacemit,udc-mode属性配置为MV_USB_MODE_OTG。 - 在 DTS 中需要通过
otg节点和udc节点的spacemit,extern-attr配置 vbus 和 idpin 的检测支持,配置为MV_USB_HAS_VBUS_IDPIN_DETECTION。
OTG 节点方案 DTS 配置示例如下(假设使用 pinctrl 配置采用 k1-x_pinctrl.dtsi 中的 pinctrl_usb0_1 节点),参考 k1-x_evb.dts:
&pinctrl{
pinctrl_usb0_1: usb0_1_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_64, MUX_MODE1, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)) /* vbus_on0 */
K1X_PADCONF(GPIO_65, MUX_MODE1, (EDGE_NONE | PULL_UP | PAD_1V8_DS2)) /* usb_id0 */
K1X_PADCONF(GPIO_63, MUX_MODE1, (EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)) /* drive_vbus0_iso */ >;
};
};
&extcon {
status = "okay";
};
&otg {
spacemit,udc-mode = <MV_USB_MODE_OTG>;
spacemit,extern-attr = <MV_USB_HAS_VBUS_IDPIN_DETECTION>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usb0_1>;
status = "okay";
};
&usbphy {
status = "okay";
};
&udc {
spacemit,udc-mode = <MV_USB_MODE_OTG>;
spacemit,extern-attr = <MV_USB_HAS_VBUS_IDPIN_DETECTION>;
status = "okay";
};
&ehci {
spacemit,udc-mode = <MV_USB_MODE_OTG>;
status = "okay";
};
USB 休眠唤醒
K1 USB 支持 两种 系统休眠策略:
- reset-resume 策略,保持USB最低功耗
- no-reset 策略
USB2.0 OTG 需要在 otg 节点和 ehci 节点配置 spacemit,reset-on-resume 属性使能 reset-resume。
如果需要支持 USB Remote Wakeup:
- 需要对
ehci节点,otg节点禁用spacemit,reset-on-resume属性 - 并且启用
wakeup-source属性 - 此外系统 PMU 需要使能 USB 唤醒的唤醒源,参考下文章节。
&otg {
/*spacemit,reset-on-resume;*/
wakeup-source;
.... 其他参数省略,请参照上面的配置
};
&ehci {
/*spacemit,reset-on-resume;*/
wakeup-source;
.... 其他参数省略,请参照上面的配置
};
USB2.0 HOST 配置介绍
CONFIG 配置
CONFIG_K1XCI_USB2_PHY 为 USB2.0 HOST 的 PHY 提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Physical Layer drivers
-> K1x ci USB 2.0 PHY Driver (K1XCI_USB2_PHY [=y])
CONFIG_USB_EHCI_K1X 为 USB2.0 HOST 的 Host 功能提供支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> EHCI HCD (USB 2.0) support (USB_EHCI_HCD [=y])
-> EHCI support for Spacemit k1x USB controller (USB_EHCI_K1X [=y])
DTS 配置
以 Host Only 模式工作
USB2.0 HOST支持配置为 以Host Only模式工作。
USB2.0 HOST 控制器 host 模式对应的设备树节点为 ehci1,作为 host 模式工作时,可以通过 DTS 配置:
ehci1节点的spacemit,udc-mode属性为MV_USB_MODE_HOST(默认值)来选择 host 模式。- 如果 host 需要适用 GPIO 控制 vbus 开关,可以使用
spacemit_onboard_hub驱动配置。 - 可选属性
spacemit,reset-on-resume,用于控制系统休眠唤醒后是否 reset 控制器。
&usbphy1 {
status = "okay";
};
&ehci1 {
spacemit,reset-on-resume;
spacemit,udc-mode = <MV_USB_MODE_HOST>;
status = "okay";
};
USB 休眠唤醒
K1 USB支持两种系统休眠策略:
- reset-resume 策略,保持USB最低功耗
- no-reset策略
USB2.0 HOST 控制器需要在 ehci1 节点配置 spacemit,reset-on-resume 属性使能 reset-resume。
如果需要支持USB Remote Wakeup:
- 需要对 ehci1 节点禁用
spacemit,reset-on-resume属性 - 并且启用
wakeup-source属性 - 此外系统 PMU 需要使能 USB 唤醒的唤醒源,见下文章节。
&ehci1 {
/*spacemit,reset-on-resume;*/
wakeup-source;
.... 其他参数省略,请参照上面的配置
};
USB3.0 DRD 配置介绍
CONFIG 配置
CONFIG_K1XCI_USB2_PHY 为 USB3.0 DRD 的 USB2.0 Port 提供 PHY 支持,默认 Y。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Physical Layer drivers
-> K1x ci USB 2.0 PHY Driver (K1XCI_USB2_PHY [=y])
CONFIG_PHY_SPACEMIT_K1X_COMBPHY 为 USB3.0 DRD 的 SuperSpeed PHY 提供支持,默认 Y。
Device Drivers
-> PHY Subsystem
-> Spacemit K1-x USB3&PCIE combo PHY driver (PHY_SPACEMIT_K1X_COMBPHY [=y])
CONFIG_USB_DWC3_SPACEMIT 为 SpacemiT USB3.0 DRD 控制器驱动提供平台支持,默认情况下,此选型为 Y
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> DesignWare USB3.0 DRD Core Support (USB_DWC3 [=y])
-> Spacemit Platforms (USB_DWC3_SPACEMIT [=y])
CONFIG_USB_DWC3_DUAL_ROLE 为 USB3.0 DRD 控制器提供双模式支持,默认情况下,此选型为 Y,实际角色可以由设备树配置。
也可选择配置为单 Host 模式或者单 Device 模式。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> DesignWare USB3.0 DRD Core Support (USB_DWC3 [=y])
-> DWC3 Mode Selection (<choice> [=y])
-> Dual Role mode (USB_DWC3_DUAL_ROLE [=y])
DTS 配置
以 Host Only 模式工作
USB3.0 DRD 控制器的设备树节点为 usbdrd3。对应 high-speed utmi phy 节点为 usb2phy,对应 superspeed pipe phy 节点为 combphy,使用 USB3.0 DRD 控制器时需要使能这两个节点。phy 节点无参数配置。
&usb2phy {
status = "okay";
};
&combphy {
status = "okay";
};
USB3.0 DRD 控制器有部分参数通过 DTS 的 usbdrd3 节点的子节点 dwc3 节点配置,需要配置部分 quirk 参数如下:
&usbdrd3 {
status = "okay";
dwc3@c0a00000 {
dr_mode = "host";
phy_type = "utmi";
snps,hsphy_interface = "utmi";
snps,dis_enblslpm_quirk;
snps,dis_u2_susphy_quirk;
snps,dis_u3_susphy_quirk;
snps,dis-del-phy-power-chg-quirk;
snps,dis-tx-ipgap-linecheck-quirk;
snps,parkmode-disable-ss-quirk;
};
};
如果 Host 需要使用 GPIO 控制 vbus 开关,可以使用 spacemit_onboard_hub 驱动配置。
以 Device Only 模式工作
USB3.0 DRD 控制器的角色通过 usbdrd3 节点的子节点 dwc3 的 dr_mode 属性配置,可选 host 、 peripheral 、 otg 。 dr_mode 属性配置为 peripheral 则以 device only 模式工作。
以 DRD 模式工作
配置 dr_mode 为 otg 模式时,DTS 节点中需要配置 usb-role-switch 布尔属性为真。可以通过 role-switch-default-mode 字符串属性配置对应的�默认角色,可选值为 host 、 peripheral。
&usbdrd3 {
dwc3@c0a00000 {
dr_mode = "otg";
usb-role-switch;
.... 其他参数省略,请参照上面的�配置
role-switch-default-mode = "host";
};
};
配置后,/sys/class/usb_role/ 下会出现一个 c0a00000.dwc3-role-switch 节点。目前 dwc3 驱动仅支持通过 debugfs 进行角色切换:
# 查看控制器当前角色:
cat /sys/kernel/debug/usb/c0a00000.dwc3/mode
# 切换至 host 角色:
echo host > /sys/kernel/debug/usb/c0a00000.dwc3/mode
# 切换至 device 角色:
echo device > /sys/kernel/debug/usb/c0a00000.dwc3/mode
以上是支持手动切换控制器角色的配置说明,如果需要支持自动检测 OTG 的功能需要配置额外的检测芯片驱动,参考内核文档 extcon、typec、usb-connector 相关内容。
如果 Host 需要适用 GPIO 控制 vbus 开关,可以使用 spacemit_onboard_hub 驱动配置。
对于 usb3.0 device 的使用场景,建议 role-switch 上报源(如 Type-C 驱动)遵守检测到 device disconnect 时(通常为检测到 vbus 断开,Type-C 则检测到 detach)上报 USB_ROLE_NONE 状态,并且在设备树节点为 dwc3@c0a00000 启用 monitor-vbus 属性。
配置后控制器将依赖 USB_ROLE_NONE 状态做断开检测进行软件重置,得到更好的兼容性,基于 Type-C 上报参考内核 Type-C 文档。
基于GPIO上报的示例如下:
&usbdrd3 {
dwc3@c0a00000 {
dr_mode = "otg";
.... 其他参数省略,请参照上面的配置
monitor-vbus;
usb-role-switch;
role-switch-default-mode = "peripheral";
connector {
/* Report vbus connection state from MCU */
compatible = "gpio-usb-b-connector", "usb-b-connector";
type = "micro";
label = "Type-C";
vbus-gpios = <&gpio 78 GPIO_ACTIVE_HIGH>;
};
};
};
以 High-Speed Only 模式工作 / 与 PCIE0 共同工作
USB3.0 DRD控制器物理上有两个 Ports:
- USB2.0 Port 记为 USB2
- SuperSpeed Port 记为 USB3
且 SuperSpeed Port PHY 与 PCIE0 共用,因此启用 USB3.0 DRD 且需要 SuperSpeed 5Gbps 支持时,无法使用PCIE0;仅支持 USB2 Port(480Mbps) 和 PCIE0 共用。
对于方案设计需要拆开 USB2 硬件网络和 USB3/PCIE0 硬件网络, 可以对 DTS 做如下修改:
- 删除 usbdrd3 节点的 phys 和 phy-names 属性
- 启用 dwc3@c0a00000 节点的 maximum-speed 属性并配置为 high-speed
这样会限制 USB3.0 DRD 控制器只启用其 USB2 Port。
方案 DTS 配置示例如下:
&usbdrd3 {
status = "okay";
......(其他配置见上文)
/* Do not init PIPE3 phy for PCIE0 */
/delete-property/ phys;
/delete-property/ phy-names;
dwc3@c0a00000 {
maximum-speed = "high-speed";
......(其他配置见上文)
};
};
&pcie0_rc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pcie0_2>;
status = "okay";
};
USB休眠唤醒
K1 USB 支持两种系统休眠策略:
- reset-resume策略,保持USB最低功耗
- no-reset策略。
USB3.0 DRD 控制器需要在 usbdrd3 节点配置 reset-on-resume 属性使能 reset-resume。
如果需要支持 USB Remote Wakeup:
- 需要对
usbdrd3节点禁用reset-on-resume属性 - 并且启用
wakeup-source属性。 - 此外系统 PMU 需要使能 USB 唤醒的唤醒源,见下文章节。
&usbdrd3 {
/*reset-on-resume;*/
wakeup-source;
.... 其他参数省略,请参照上面的配置
};
其他USB配置介绍
其他USB CONFIG配置
CONFIG_USB 为 USB 总线协议提供支持,默认情况,此选项为 Y
Device Drivers
-> USB support (USB_SUPPORT [=y])
对于 U 盘、USB 网卡、USB 打印机等配置需要打开,常用的选型默认 Y,此处不一一列举。
CONFIG_USB_ROLE_SWITCH 为基于 role-switch 的模式切换提供支持(如 Type-C 接口 OTG 可能使用):
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Role Switch Support (USB_ROLE_SWITCH [=y])
CONFIG_USB_GADGET 为 USB Device 模式提供支持,默认,此选项为 Y
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Gadget Support (USB_GADGET [=y])
CONFIG_USB_GADGET 下可选支持 Configfs 配置的 function,如 RNDIS,此处根据实际需求配置,默认常用的已打开。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Gadget Support (USB_GADGET [=y])
-> USB Gadget functions configurable through configfs (USB_CONFIGFS [=y])
-> RNDIS (USB_CONFIGFS_RNDIS [=y])
-> Function filesystem (FunctionFS) (USB_CONFIGFS_F_FS [=y])
-> USB Webcam function (USB_CONFIGFS_F_UVC [=y])
-> ....
CONFIG_SPACEMIT_ONBOARD_USB_HUB 为板载 USB 外设供电配置的帮助驱动提供支持。
Device Drivers
-> USB support (USB_SUPPORT [=y])
-> Spacemit onboard USB hub support (SPACEMIT_ONBOARD_USB_HUB [=y])
其他 USB DTS 配置
目前支持通过 spacemit_onboard_hub 驱动配置开机自动配置部分 USB 相关上电逻辑,主要用于板载 VBUS 开关、需要上电的 hub 使用。
驱动的 compatible 为 spacemit,usb3-hub,支持配置两组 GPIO:
- hub-gpios:用于 hub 上电。
- vbus-gpios:用于对外 vbus 供电。
支持属性:
hub_inter_delay_ms: int, hub-gpios 中的 GPIO 之间的延迟。vbus_inter_delay_ms: int, vbus-gpios 中 GPIO 之间的延迟。vbus_delay_ms: int, 配置 hub 上电后多久才能打开 vbus。suspend_power_on: bool, 系统休眠时是否保留电源。需要支持 USB Remote Wakeup(如键盘鼠标唤醒),此项必须配置。
DTS配置示例:
usb2hub: usb2hub {
compatible = "spacemit,usb3-hub";
hub-gpios = <&gpio 74 0>;
vbus-gpios = <&gpio 91 0 &gpio 92 0>;
status = "okay";
};
USB 休眠唤醒配置介绍
供电设计
休眠需要低功耗的场景,建议休眠时关闭 USB 对外 5V VBUS 供电,对于 USB 供电支持 GPIO 控制的方案,可以参考其他 USB DTS 配置中关于 spacemit_onboard_hub 驱动的配置说明。
对于以下场景,休眠时需要保留USB对外5V VBUS(或板载USB外设供电)供电:
- 支持USB Remote Wakeup如USB键盘鼠标唤醒的功能。
- 需要打开摄像头视频流进入休眠,唤醒后恢复上层应用视频流的应用场景。部分摄像头如果休眠断电不支持恢复。
- 对于存在上电后初始化较久的设备(从上电到响应枚举大于2s,如部分4G模组),需要休眠唤醒过程不出现设备断开重连接的行为,建议休眠时不要关闭电源供电。
- 对于适应设备兼容性及需要使用USB对外提供供电的其他场景。
对于以下场景,休眠时需要保持对 SOC 的 USB 模块 1.8V 供电(AVDD18_USB, AVDD18_PCIE):
- 支持 USB Remote Wakeup 如 USB 键盘鼠标唤醒的功能。
- 未启用
reset-on-resume/spacemit,reset-on-resume的情况(见各控制器章节)。
CONFIG配置
需要使能 CONFIG_PM_SLEEP。
DTS配置
这里介绍如何使能系统的 USB 唤醒源,各个控制器的 DTS 配置请参考控制器相关章节。
如果需要支持 USB Remote Wakeup 如 USB 键盘鼠标从休眠唤醒系统的功能,需要为设备树下soc->pmu->power节点配置 pmu_wakeup5 bool属性。
DTS示例:
&pmu {
power: power-controller {
pmu_wakeup5;
};
};
接口介绍
API介绍
Host API 介绍
USB host 端接入的设备通常会接入系统其他子系统,如 U 盘存储设备接入存储子系统、USB HID 接入 INPUT 子系统等,请参阅相关的 Linux 内核 API 介绍。
如果需要开发自定义协议的 USB 外设驱动,可参考 Linux 内核 driver-api/usb/writing_usb_driver 进行内核态驱动开发或参考 libusb 文档进行用户态驱动开发。
Device API 介绍
USB Device支持通过 Configfs 配置,请参考 Linux内核文档 usb/gadget_configfs,部分功能需要搭配应用层服务程序使用。
此外 SpacemiT 提供了bianbu-linux/usb-gadget工具,其中有使用 Configfs 配置 USB Device 的脚本可供使用和参考,请参阅对应页面的帮助文档。
如果需要开发自定义协议的 USB Device ��模式驱动,可基于 FunctionFS 开发用户态驱动,可参考 Linux 内核文档usb/functionfs 和 Linux 内核源码目录 tools/usb/ffs-aio-example 案例。
Debug介绍
通用USB Host Debug介绍
sysfs
查看 USB 设备信息
ls /sys/bus/usb/devices/
1-0:1.0 1-1.1:1.0 1-1.3 1-1.4:1.0 2-1.1 2-1.1:1.2 2-1.5:1.0 usb1
...
sysfs 下的 USB 路径命名如下:
<bus>-<port[.port[.port]]>:<config>.<interface>
其中对于 Device 层级的 sysfs 目录,可以查询到对应设备的一些信息,选取常用介绍如下:
idProduct, idVendor: USB设备的PID和VID。
product: 产品名称字符串。
speed: 如480为USB2.0 high-speed, 5000为USB3.0 SuperSpeed。
更多内容可参考 Linux 内核 ABI/stable/sysfs-bus-usb, ABI/testing/sysfs-bus-usb 等文档。
debugfs
查询 USB 的设备信息
cat /sys/kernel/debug/usb/devices
T: Bus=01 Lev=00 Prnt=00 Port=00 Cnt=00 Dev#= 1 Spd=480 MxCh= 1
B: Alloc= 0/800 us ( 0%), #Int= 0, #Iso= 0
D: Ver= 2.00 Cls=09(hub ) Sub=00 Prot=01 MxPS=64 #Cfgs= 1
P: Vendor=1d6b ProdID=0002 Rev= 6.06
S: Manufacturer=Linux 6.6.36+ ehci_hcd
S: Product=Spacemit EHCI
S: SerialNumber=mv-ehci1
C:* #Ifs= 1 Cfg#= 1 Atr=e0 MxPwr= 0mA
I:* If#= 0 Alt= 0 #EPs= 1 Cls=09(hub ) Sub=00 Prot=00 Driver=hub
E: Ad=81(I) Atr=03(Int.) MxPS= 4 Ivl=256ms
......
USB2.0 OTG Debug介绍
Device 模式下的 Debug 信息:暂不支持。
Host 模式下的 Debug 信息:
# cd /sys/kernel/debug/usb/ehci/mv-ehci/
bandwidth: 可以查看控制器当前分配的带宽。
periodic: 可以查看当前周期性传输的Debug信息。
register: dump ehci控制器寄存器。
OTG 的 Debug 信息: 如果 DTS 中配置了相关属性,可以在以下节点查看到 USB2.0 OTG Port 的当前角色信息,支持手动切换角色。
cat /sys/class/usb_role/mv-otg-role-switch/role
device
echo host > /sys/class/usb_role/mv-otg-role-switch/role
cat /sys/class/usb_role/mv-otg-role-switch/role
host
USB2.0 HOST Debug介绍
Host 模式下的 Debug 信息:
# cd /sys/kernel/debug/usb/ehci/mv-ehci1/
bandwidth: 可以查看控制器当前分配的带宽。
periodic: 可以查看当前周期性传输的Debug信息。
register: dump ehci控制器寄存器。
USB3.0 DRD Debug介绍
Device 模式下的 Debug 信息:
# cd /sys/kernel/debug/usb/c0a00000.dwc3
link_state: 查看Device模式下时的链路状态。
Host 模式下的 Debug 信息:
# cd /sys/kernel/debug/usb/xhci/xhci-hcd.0.auto
# 查看USB3.0 USB2.0 Port端口信息
cat ports/port01/portsc
Powered Connected Enabled Link:U0 PortSpeed:3 Change: Wake:
# 查看USB3.0的SS Port信息
cat ports/port02/portsc
Powered Connected Enabled Link:U3 PortSpeed:4 Change: Wake: WDE WOE
DRD 的 Debug 信息:
cat /sys/kernel/debug/usb/c0a00000.dwc3/mode
device
# 手动切换数据角色(需要DTS配置dr_mode=otg)
echo host > /sys/kernel/debug/usb/c0a00000.dwc3/mode
cat /sys/kernel/debug/usb/c0a00000.dwc3/mode
host
其他 Debug 介绍
目前支持通过 spacemit_onboard_hub 驱动配置开机自动配置部分 USB 相关上电逻辑,也提供了部分 debug 支持:
路径在 USB 的 debugfs 目录下,名称为 spacemit_onboard_hub 的 DTS 路径名称, 如 usb2hub。
# cd /sys/kernel/debug/usb/usb2hub/
hub_on: hub-gpios的开关情况。可写入 0/1 控制。
vbus_on: vbus-gpios的开关情况。可写入 0/1 控制。
suspend_power_on: 控制系统休眠时是否关闭电源,由DTS配置默认值。
测试介绍
USB设备识别可以通过应用层工具 lsusb 查看,还可以使用 lsub -tv 查看树形详细信息。
$ lsusb
Bus 003 Device 002: ID 2109:0817 VIA Labs, Inc. USB3.0 Hub
Bus 003 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
.....
USB 设备描述符可以通过应用层工具 lsusb -v 查看。
$ lsusb -v -s 001:001
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 2.00
bDeviceClass 9 Hub
.....
针对 USB 外设可以通过第三方工具完成性能和功能测试,例如:
- USB 存储的读写测试可以使用 FIO 工具,目前 bianbu-linux 上已集成 FIO
- 鼠标键盘功能验证可以通过查看 input 子系统(可选用evtest、getevent等工具)
- 网卡功能可以使用 ping 命令、iperf3 等测试。