PMIC
Regulator Functionality and Usage Guide.
Overview
The term 'regulator' refers to a device that controls voltage and current output. SpacemiT P1 chip is a PMIC (Power Management Integrated Circuit) with this functionality. In the Linux kernel, the regulator framework provides a standardized interface for voltage and current control.
Function
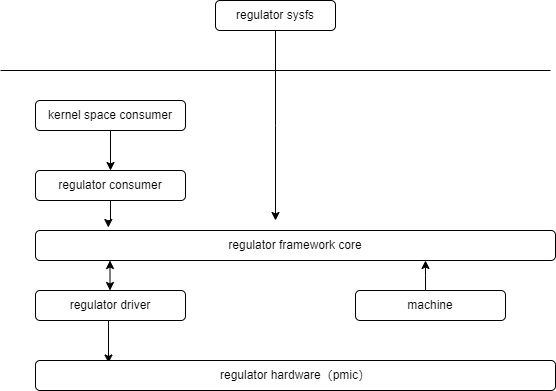
- Regulator Consumer: Devices powered by regulators, which consume the electricity provided by the regulators.
- Regulator Framework: Provides standard kernel interfaces to control the system's voltage/current regulators and 3. offers mechanisms for switching, voltage, and current settings.
- Regulator Driver: The driver code for regulators, responsible for registering devices with the framework and communicating with the underlying hardware.
- Machine: Configures regulator properties for the target hardware.
Source Code Structure
drivers/regulator/
├── core.c
├── devres.c
├── dummy.c
├── dummy.h
├── fixed.c
├── fixed-helper.c
├── gpio-regulator.c
├── helpers.c
├── internal.h
├── irq_helpers.c
├── Kconfig
├── Makefile
├── of_regulator.c
├── spacemit-regulator.c
Key Features
| Feature | Description |
|---|---|
| 6-Channel DCDC Support | Supports dynamic voltage adjustment and enable/disable |
| 5-Channel ALDO Support | Supports voltage adjustment and enable/disable |
| 7-Channel DLDO Support | Supports voltage adjustment and enable/disable |
Configuration Introduction
It mainly includes driver enablement configuration and DTS configuration.
CONFIG Configuration
CONFIG_REGULATOR_SPACEMIT:
This driver provides support for the voltage regulators on the
spacemit pmic.
Symbol: REGULATOR_SPACEMIT [=y]
Type : tristate
Defined at drivers/regulator/Kconfig:1666
Prompt: Spacemit regulator support
Depends on: REGULATOR [=y] && MFD_SPACEMIT_PMIC [=y]
Location:
-> Device Drivers
-> Voltage and Current Regulator Support (REGULATOR [=y])
-> Spacemit regulator support (REGULATOR_SPACEMIT [=y])
Selects: REGULATOR_FIXED_VOLTAGE [=y]
DTS Configuration
&i2c8 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c8>;
status = "okay";
spm8821@41 {
compatible = "spacemit,spm8821";
reg = <0x41>;
interrupt-parent = <&intc>;
interrupts = <64>;
status = "okay";
vcc_sys-supply = <&vcc4v0_baseboard>;
dcdc5-supply = <&dcdc_5>;
regulators {
compatible = "pmic,regulator,spm8821";
/* buck */
dcdc_1: DCDC_REG1 {
regulator-name = "dcdc1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-always-on;
};
dcdc_2: DCDC_REG2 {
regulator-name = "dcdc2";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-always-on;
};
dcdc_3: DCDC_REG3 {
regulator-name = "dcdc3";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <1800000>;
regulator-always-on;
};
dcdc_4: DCDC_REG4 {
regulator-name = "dcdc4";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
};
dcdc_5: DCDC_REG5 {
regulator-name = "dcdc5";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-always-on;
};
dcdc_6: DCDC_REG6 {
regulator-name = "dcdc6";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-always-on;
};
/* aldo */
ldo_1: LDO_REG1 {
regulator-name = "ldo1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
regulator-boot-on;
};
ldo_2: LDO_REG2 {
regulator-name = "ldo2";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_3: LDO_REG3 {
regulator-name = "ldo3";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_4: LDO_REG4 {
regulator-name = "ldo4";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
/* dldo */
ldo_5: LDO_REG5 {
regulator-name = "ldo5";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
regulator-boot-on;
};
ldo_6: LDO_REG6 {
regulator-name = "ldo6";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_7: LDO_REG7 {
regulator-name = "ldo7";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_8: LDO_REG8 {
regulator-name = "ldo8";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
regulator-always-on;
};
ldo_9: LDO_REG9 {
regulator-name = "ldo9";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_10: LDO_REG10 {
regulator-name = "ldo10";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
regulator-always-on;
};
ldo_11: LDO_REG11 {
regulator-name = "ldo11";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
sw_1: SWITCH_REG1 {
regulator-name = "switch1";
};
};
};
};
Interface
API
Please refer to the kernel documentation:
- Documentation/power/regulator/consumer.rst
- Documentation/power/regulator/machine.rst
- Documentation/power/regulator/regulator.rst
Demo Example
1. Configure the dts to reference the regulator you want to use:
&cpu_0 {
clst0-supply = <&dcdc_1>;
vin-supply-names = "clst0";
};
Obtain the corresponding handle in the code:
const char *strings;
struct regulator *regulator;
err = of_property_read_string_array(cpu_dev->of_node, "vin-supply-names",
&strings, 1);
regulator = devm_regulator_get(cpu_dev, strings); --> The passed-in struct device * must have a corresponding entity
Enable the corresponding regulator in the code:
regulator_enable(regulator);
Set the voltage of the corresponding regulator in the code:
regulator_set_voltage(regulator, 95000000, 95000000);
Debugging
FAQ
Appendix
SPL/UBOOT Usage Method
uboot-2022.10$ vi arch/riscv/dts/k1-x_spm8821.dtsi
&i2c8 {
clock-frequency = <100000>;
u-boot,dm-spl;
status = "okay";
spm8821: pmic@41 {
compatible = "spacemit,spm8821";
reg = <0x41>;
bus = <8>;
u-boot,dm-spl;
regulators {
/* buck */
dcdc_6: DCDC_REG1 {
regulator-name = "dcdc1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-init-microvolt = <950000>;
regulator-boot-on;
u-boot,dm-spl;
regulator-state-mem {
regulator-off-in-suspend;
};
};
dcdc_7: DCDC_REG2 {
regulator-name = "dcdc2";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
};
dcdc_8: DCDC_REG3 {
regulator-name = "dcdc3";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-boot-on;
u-boot,dm-spl;
};
dcdc_9: DCDC_REG4 {
regulator-name = "dcdc4";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
};
dcdc_10: DCDC_REG5 {
regulator-name = "dcdc5";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
};
dcdc_11: DCDC_REG6 {
regulator-name = "dcdc6";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
};
/* aldo */
ldo_23: LDO_REG1 {
regulator-name = "ldo1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
regulator-init-microvolt = <3300000>;
regulator-boot-on;
u-boot,dm-spl;
};
ldo_24: LDO_REG2 {
regulator-name = "ldo2";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_25: LDO_REG3 {
regulator-name = "ldo3";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_26: LDO_REG4 {
regulator-name = "ldo4";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
/* dldo */
ldo_27: LDO_REG5 {
regulator-name = "ldo5";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_28: LDO_REG6 {
regulator-name = "ldo6";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_29: LDO_REG7 {
regulator-name = "ldo7";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_30: LDO_REG8 {
regulator-name = "ldo8";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_31: LDO_REG9 {
regulator-name = "ldo9";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_32: LDO_REG10 {
regulator-name = "ldo10";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
ldo_33: LDO_REG11 {
regulator-name = "ldo11";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3400000>;
};
sw_2: SWITCH_REG1 {
regulator-name = "switch1";
};
};
};
};
SPL Stage Power-On and Voltage Setting Method
dcdc_6: DCDC_REG1 {
regulator-name = "dcdc1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-init-microvolt = <950000>; ---> Adding this field will automatically set the power supply voltage to 0.95v
regulator-boot-on; ---> Adding this field will automatically turn on the power supply during the SPL stage
u-boot,dm-spl; ---> This field is required for SPL to recognize the DTS node
regulator-state-mem {
regulator-off-in-suspend;
};
};
UBOOT Stage Power-On and Voltage Setting Method
There are two ways to set or enable a power supply during the UBOOT stage. The first method is to configure it directly in the DTS:
dcdc_6: DCDC_REG1 { --> The name parameter passed to regulator_get_by_devname
regulator-name = "dcdc1";
regulator-min-microvolt = <500000>;
regulator-max-microvolt = <3450000>;
regulator-init-microvolt = <950000>; ---> Adding this field will automatically set the power supply voltage to 0.95v
regulator-boot-on; ---> Adding this field will automatically turn on the power supply during the UBOOT stage
regulator-state-mem {
regulator-off-in-suspend;
};
};
The other method is to set it directly in the code:
1. First, obtain the regulator handle for the voltage you want to set or enable
struct udevice *rdev = NULL;
char *regulator_name = "DCDC_REG1" --> This field is the name of the DTS node specified in the DTS
ret = regulator_get_by_devname(regulator_name, &rdev);
2. Enable a specific power supply
regulator_set_enable(&rdev, true);
3. Set the voltage of a specific power supply
regulator_set_value(&rdev, 1800000);